


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Wearable function-enhanced manipulator system as well as assisting fingers and control method thereof
A finger, driving motor technology, applied in passive exercise equipment, medical science, artificial arms, etc., can solve the problems of inability to evaluate human behavior intentions in real time, unable to provide human-machine collaborative decision-making, and single control method, to achieve the realization of human-machine Collaborative control, easy control operation, enhanced hand function effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
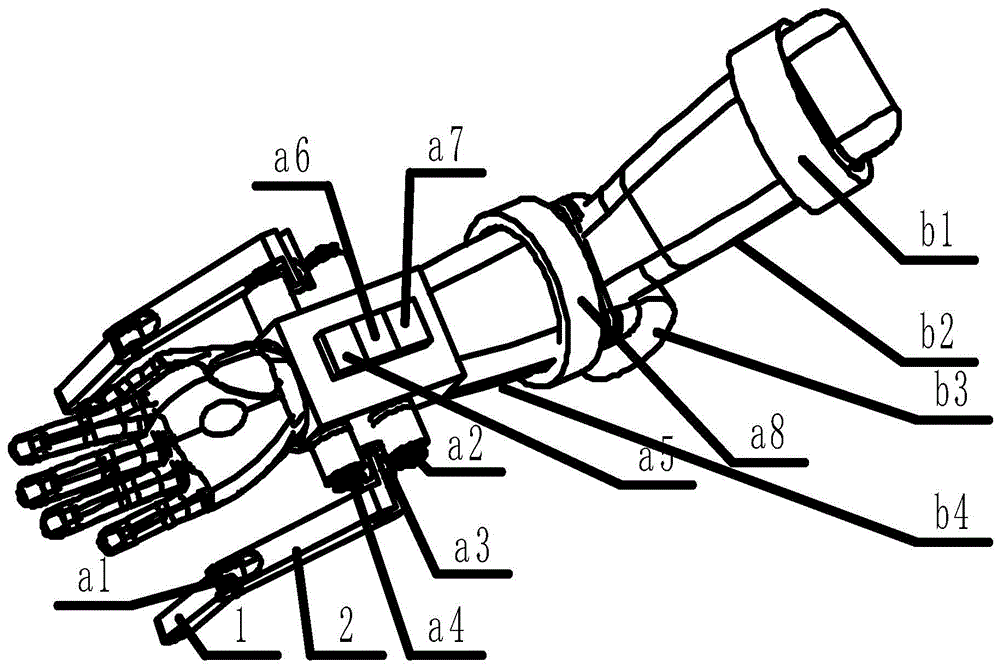
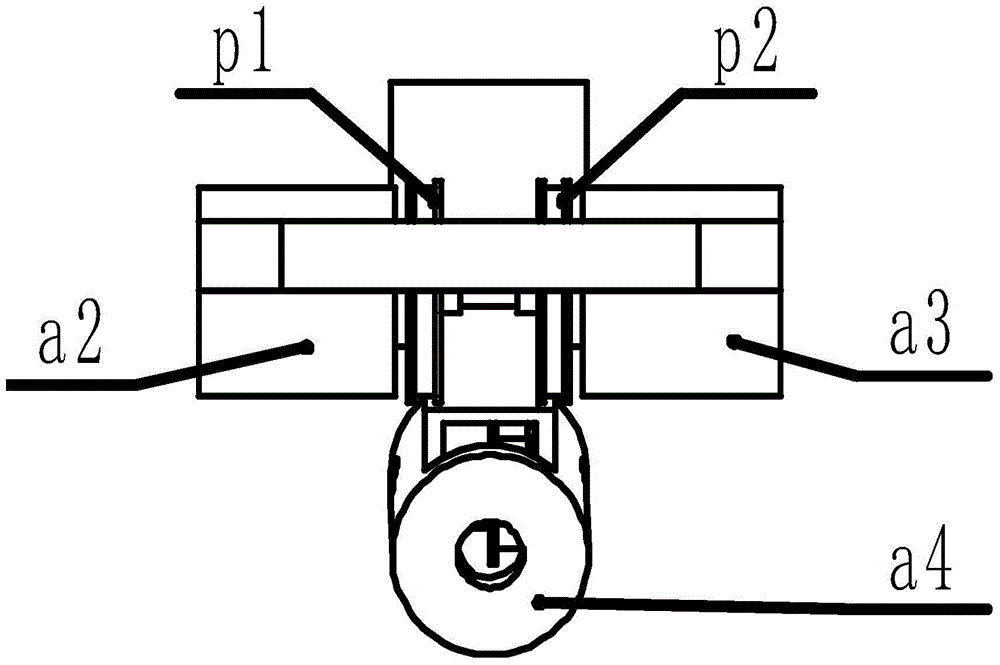
[0053] This embodiment provides an auxiliary finger, including a humanoid finger, a finger base, a motor a2, a motor a3, and a motor a4, wherein the humanoid finger is driven by a driving rope and has clamping degrees of freedom, flexion and extension degrees of freedom and recovery degrees of freedom; the motor a4 is directly driven and connected with the humanoid finger to realize the recovery degree of freedom of the humanoid finger; the rotating shaft of the motor a4 is connected with a reducer, and the output of the reducer The shaft is connected with a rotating shaft for realizing the gripping degree of freedom of the humanoid finger, and the humanoid finger is sequentially connected to the rotating shaft and the drive motor a2 through the driving rope, and the rotating shaft is driven and connected to the driving motor a2; the humanoid finger passes through The driving rope is driven and connected with the motor a3, which is used to realize the bending freedom of the hum...
Embodiment 2
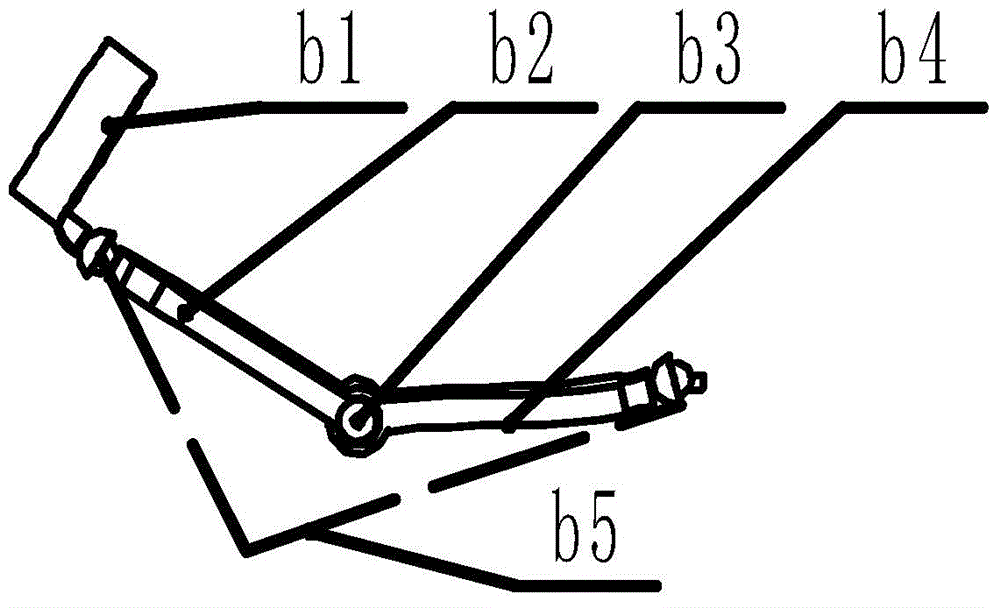
[0075] This embodiment provides a wearable function-enhanced robotic hand system, including an adaptive forearm connector b1, an upper arm link b2, a forearm link b4, a circular myoelectric collection array, and the auxiliary finger provided in Example 1, wherein:
[0076] The adaptive forearm connector b1 is connected to the upper arm link b2 through a ball joint, the upper arm link b2 is connected to the forearm link b4 through a hinge mechanism b3, and the forearm link b4 is connected to the auxiliary finger b5 through a ball joint interface b5. The wrist connector c3 of the base connects;
[0077] The ring-shaped myoelectric collection array is arranged on the forearm link;
[0078] The lengths of the upper arm link b2 and the forearm link b4 are adjustable.
[0079] Furthermore, a code disc is provided on the rotating shaft of the hinge mechanism b3, which is used to record the position information of the elbow of the human body and provide input information for the cons...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com