Novel general obstacle avoidance module for UAV (unmanned aerial vehicle) and steps
A wireless communication module and unmanned aerial vehicle technology, applied in the direction of three-dimensional position/channel control, etc., can solve the problems of complex code, difficult to modify and use, and limited functional interface, and achieve high universality, collision avoidance, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with accompanying drawing.
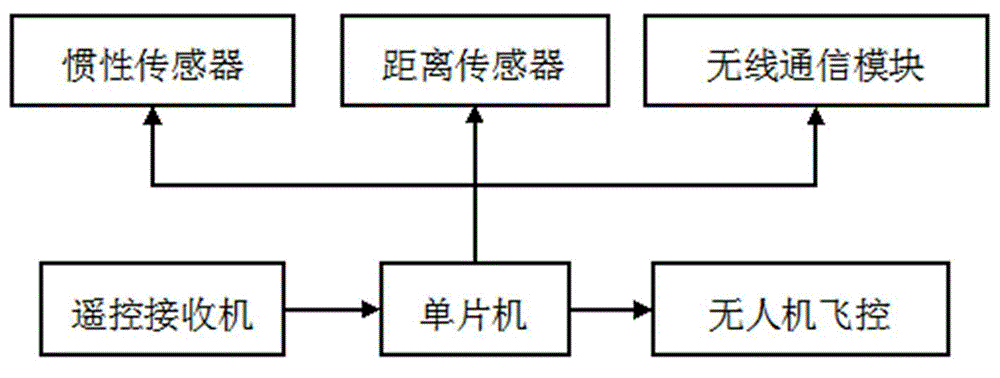
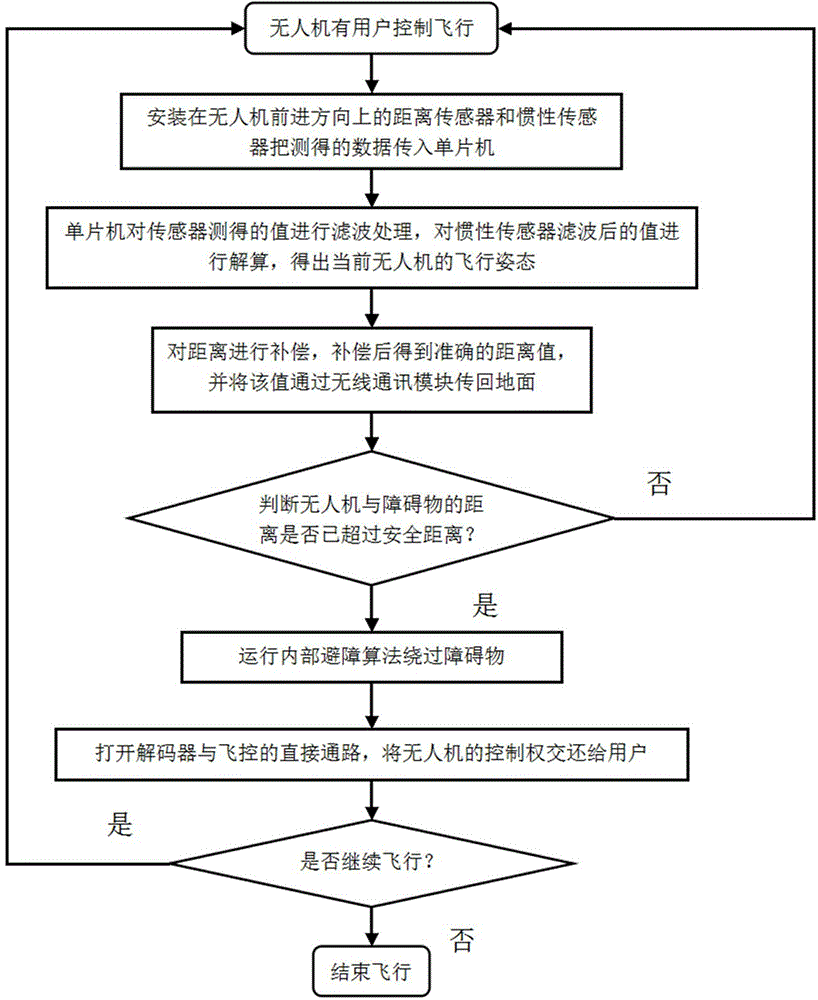
[0021] Such as figure 1 , a new universal obstacle avoidance module for unmanned aerial vehicle, the feature of the present invention is that it is composed of a distance sensor, an inertial sensor (accelerometer, gyroscope), a single-chip microcomputer and a wireless communication module; its connection structure is: a distance sensor, an inertial sensor, a wireless The communication module is connected to the single-chip microcomputer respectively, and the inertial sensor is also connected to the wireless communication module; the single-chip microcomputer is also connected to the UAV flight controller and the remote control receiver respectively; the working steps are: (such as figure 2 )
[0022] Step 1: During the flight of the UAV, the distance sensor will detect the distance of the obstacle in front in real time. The single-chip microcomputer corrects the distance ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com