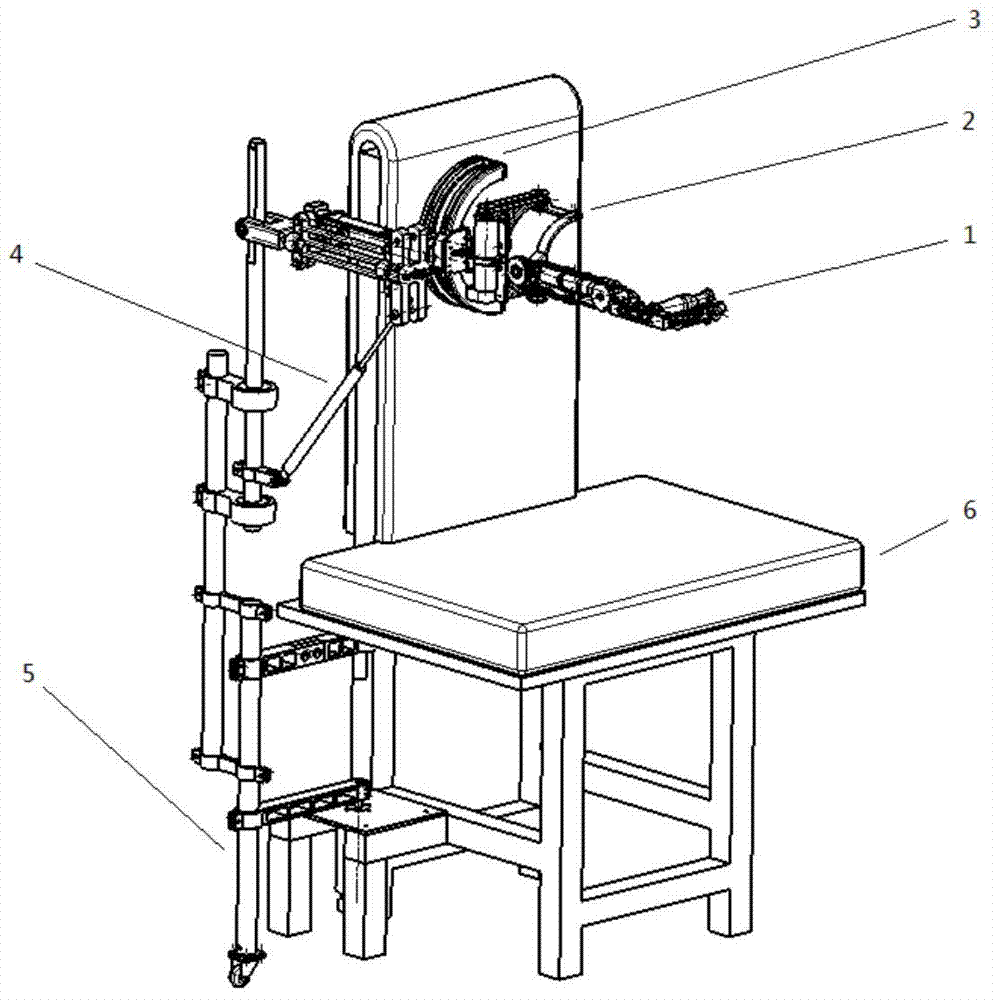
Seven-degree-of-freedom exoskeletal rehabilitation robot for upper limbs
A rehabilitation robot and exoskeleton technology, applied in the field of robotics, can solve the problems of large overall weight, unfavorable use, and uncompact structure, and achieve the effects of precise training parameters, improved training efficiency, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
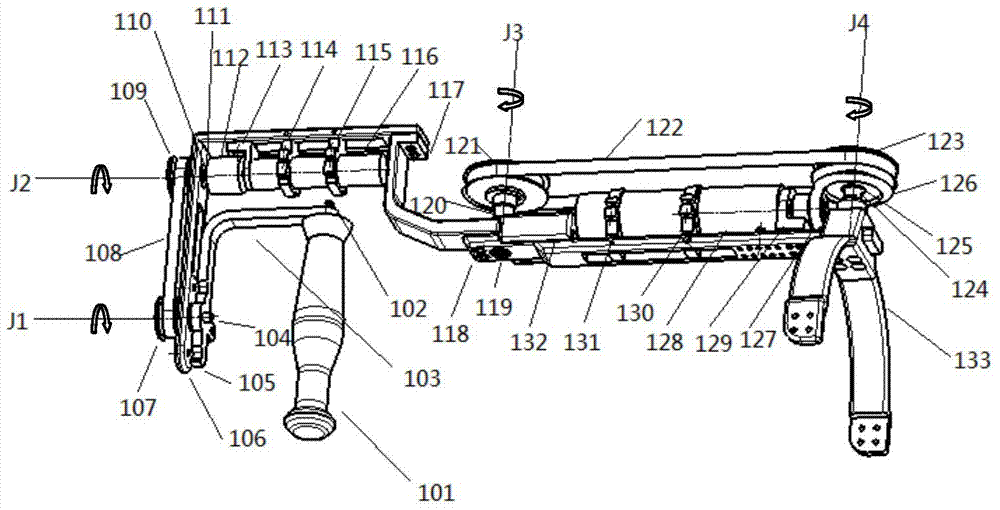
[0048] like figure 2 As shown, the rotation axis J1 is the rotation axis of the first shaft 104; the rotation axis J2 is the rotation axis of the first motor 116; the rotation axis J3 is the rotation axis of the third shaft 120 and the third pulley 121; the rotation axis J4 is the fourth pulley 123 axis of rotation.
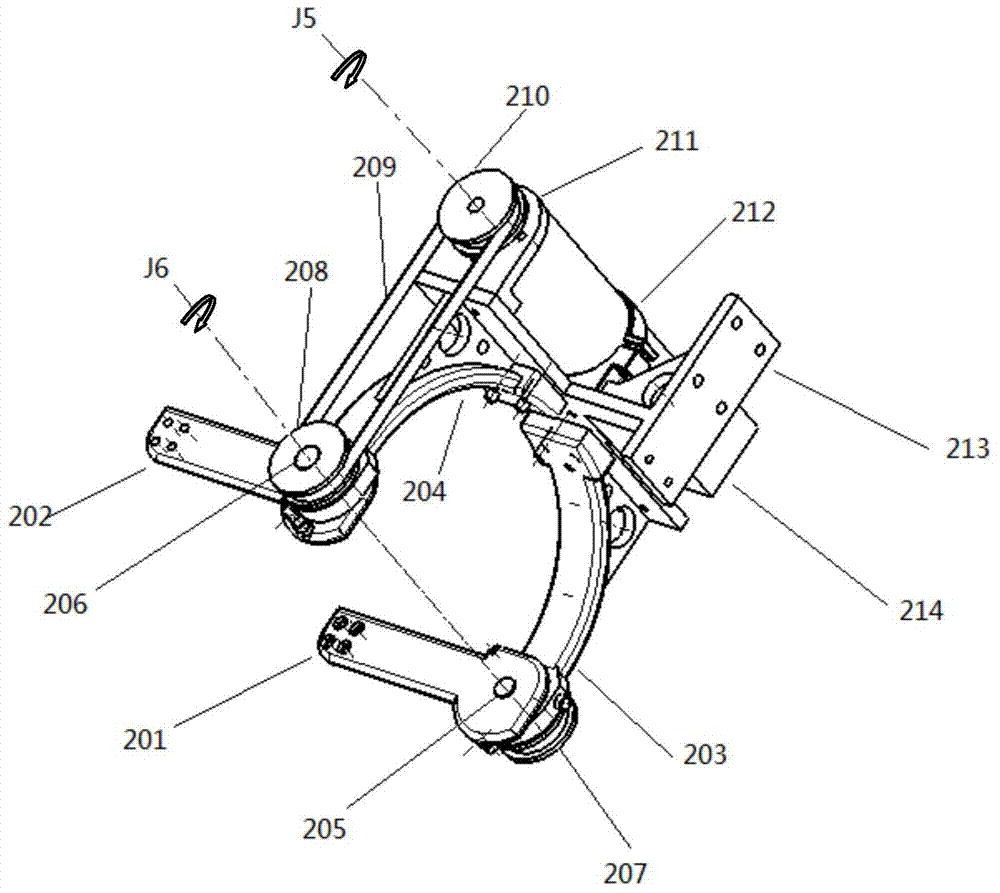
[0049] like image 3 As shown, the rotation axis J5 is the rotation axis of the elbow joint motor 214 ; the rotation axis J6 is the rotation axis of the first elbow joint shaft 20...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com