An Evaluation Method for Autonomous Navigation Filtering Algorithms for Deep Space Exploration
A technology of autonomous navigation and filtering algorithm, which is applied in the field of deep space exploration and can solve problems such as the inability to use flight tests
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0094] For the convenience of description, the relevant technical terms appearing in the specific implementation are explained first:
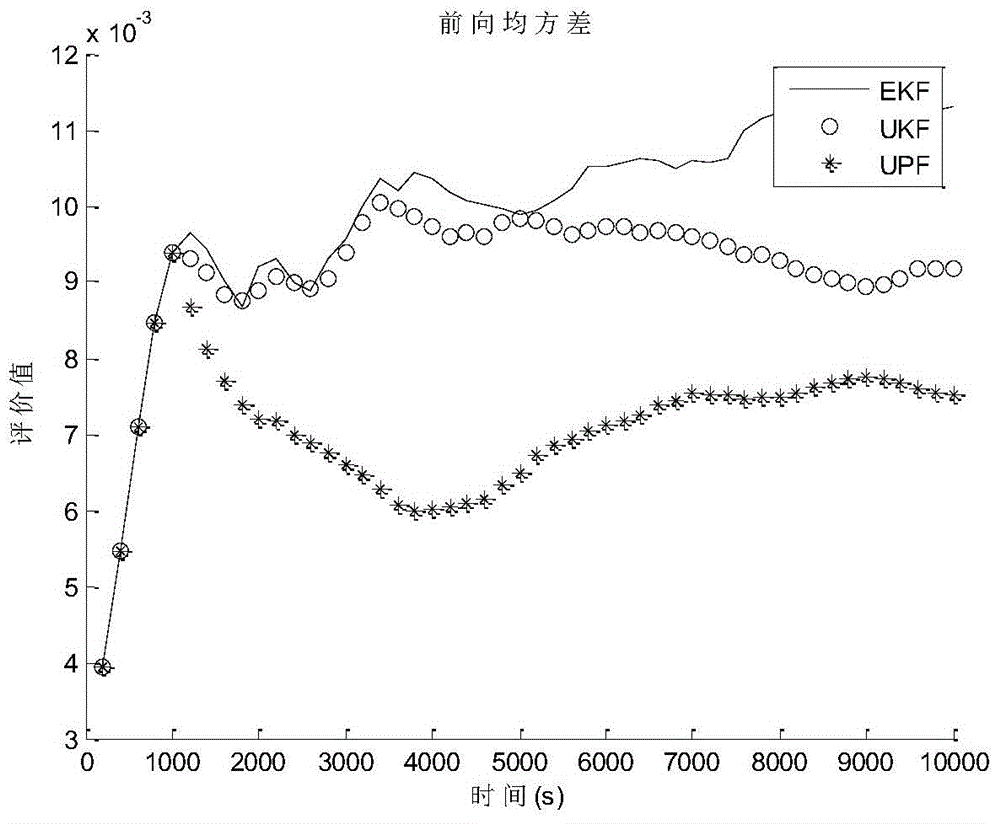
[0095] EKF (Extended Kalman Filter): Extended Kalman filter;
[0096] UKF (Unscented Kalman Filter): lossless Kalman filter, unscented Kalman filter or dearomatic Kalman filter;
[0097] UPF (Unscented particle filter): unscented particle filter;
[0098] Since this is an evaluation of the autonomous navigation filtering algorithm for deep space exploration, it is impossible for us to obtain real deep space navigation data. Therefore, we use STK and MATLAB mixed programming to obtain the simulation data Satellite_p and Satellite_v. STK provides the speed and position of the sun, the earth, Mars and its satellites, the target star and the target asteroid. Using MATLAB to simulate the process of astronomical angle measurement navigation, redshift speed measurement navigation and speed measurement and angle measurement combination navigation, we...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com