Coal mine rescue robot path planning method based on artificial potential field
A technology of artificial potential field and path planning, which is applied in navigation calculation tools and other directions, and can solve problems such as reducing calculation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
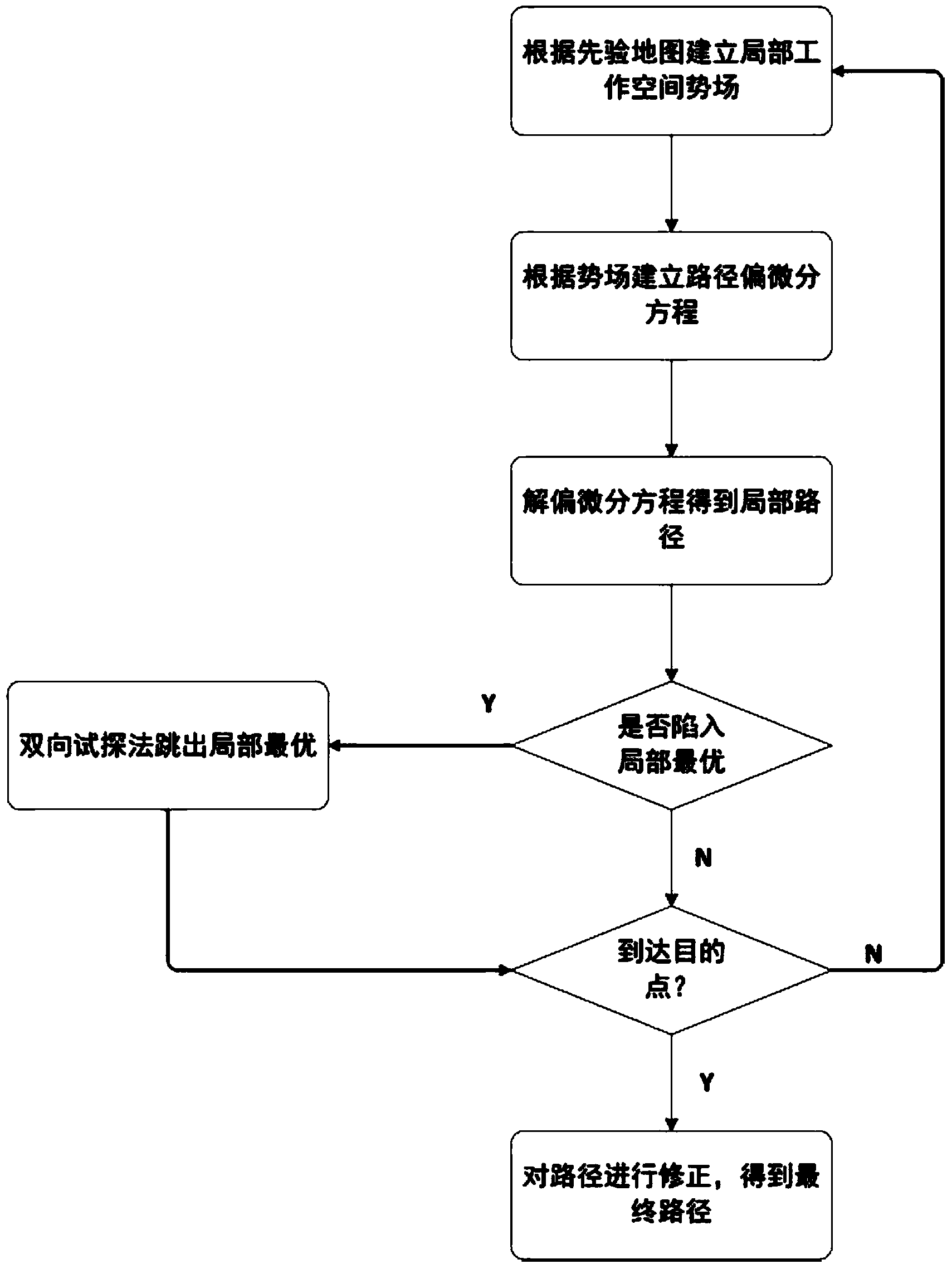
[0142] Example 1: figure 1 This is the work flow chart of the present invention.
[0143] S-1 establishes the repulsive force field in the local workspace of the robot based on the priori map;
[0144] S-2 uses the Quasi-Geodesic method to establish the path partial differential equation according to the distribution of the repulsive potential field;
[0145] S-3 solves the path equation to obtain the local path;
[0146] S-4 If it is detected that the algorithm has fallen into a local optimum, the local optimum will be dealt with;
[0147] S-5 repeats S-1 to S-4 until it reaches the destination point and obtains the initial path;
[0148] S-6 optimizes the initial path, reduces the path length, and obtains the final path.
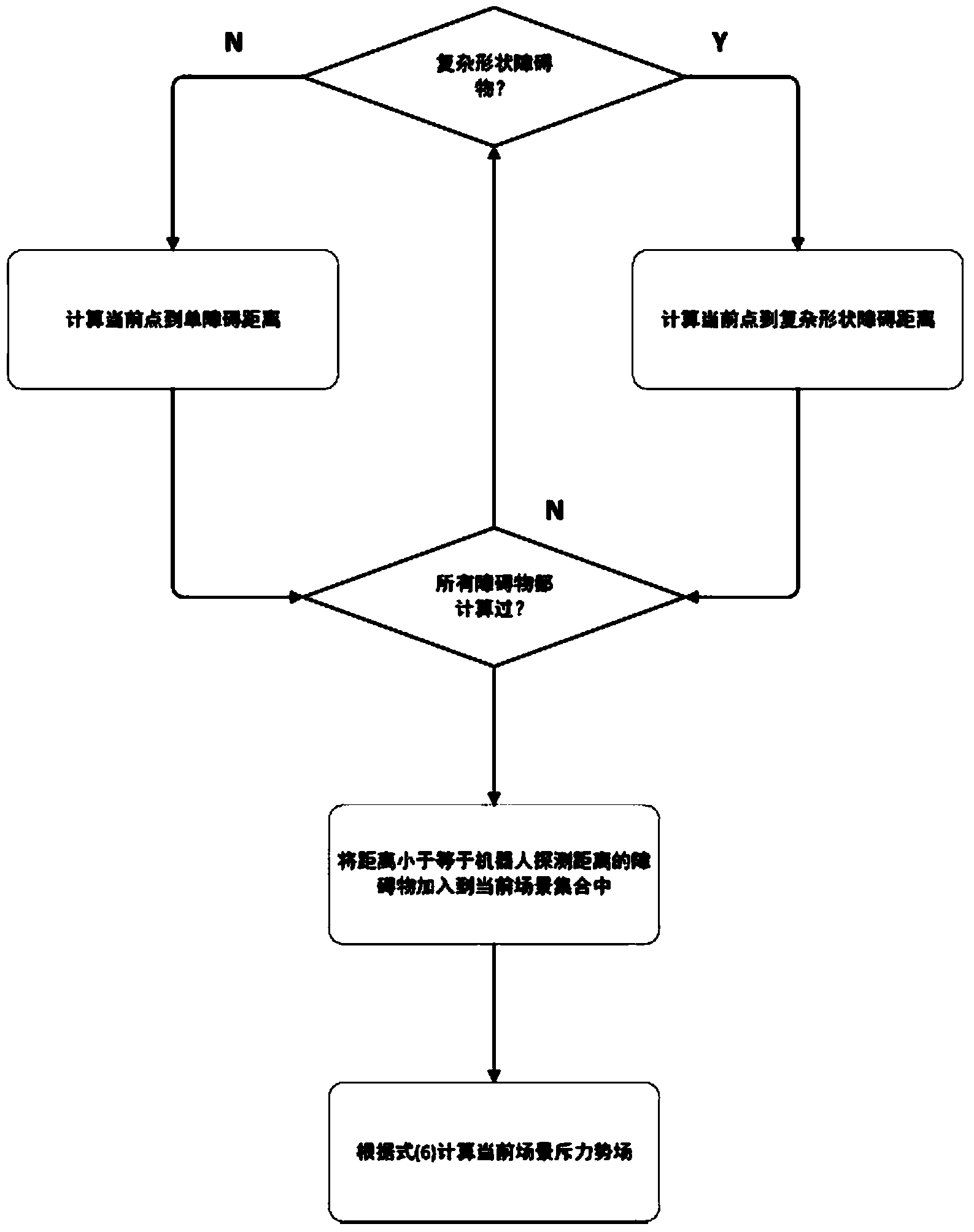
[0149] image 3 This is a flow chart for establishing the repulsion potential field of the present invention.
[0150] S-1-1 calculates the distance from the current position of the robot to each obstacle. This step can be handled in two cases:
[0151] S-1-1-1 Single ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com