Vehicle parameter on-line estimation method based on unscented Kalman filtering
An unscented Kalman and vehicle parameter technology, applied in the direction of control devices, can solve the problems of low accuracy of vehicle quality vehicle parameters, and the inability to estimate vehicle mass and center of gravity at the same time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below with reference to the embodiments and drawings, but not limited to the content described below.
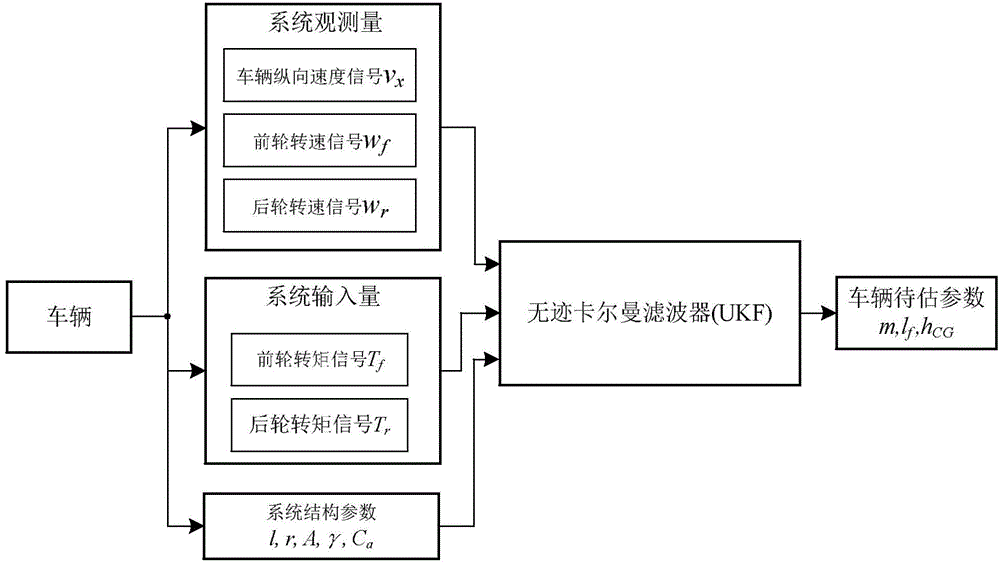
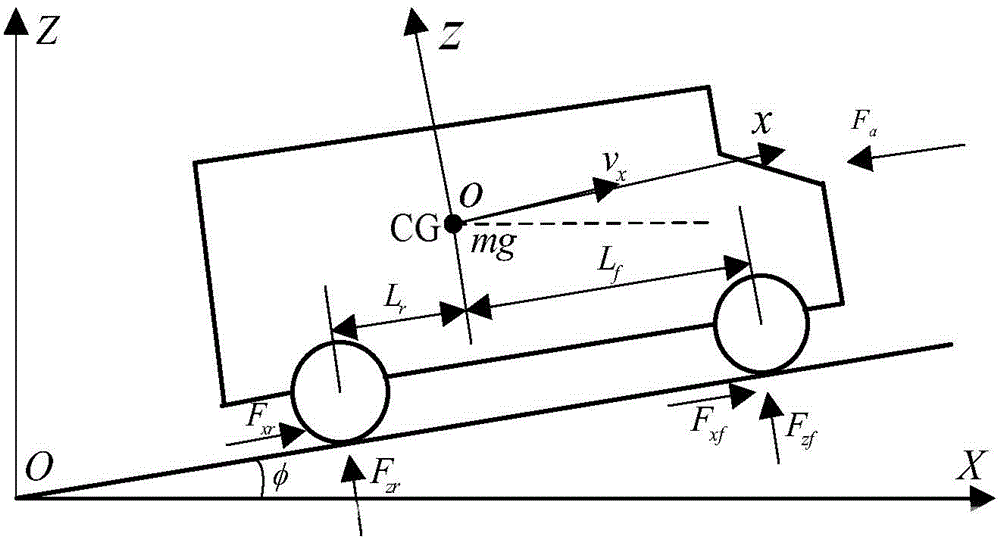
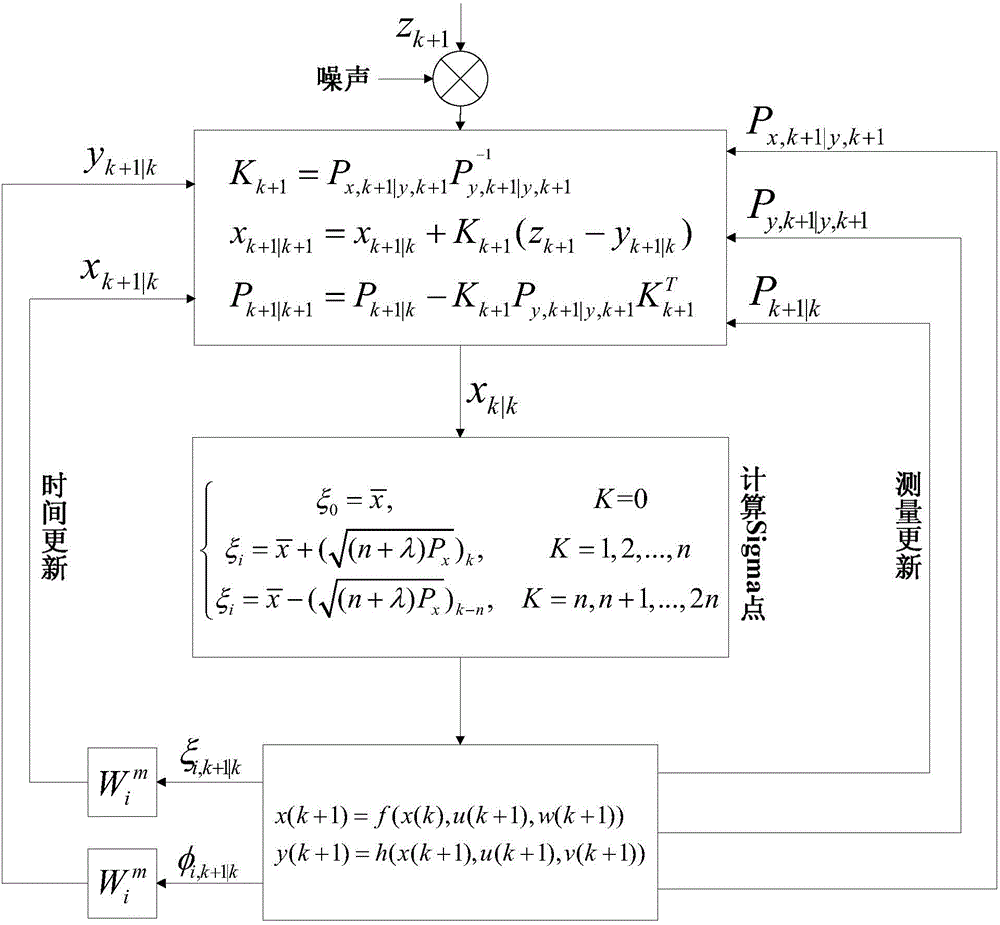
[0030] The online estimation method of vehicle parameters based on unscented Kalman filter provided by the present invention, such as figure 1 As shown, by obtaining the longitudinal velocity and acceleration of the vehicle, the angular velocity and angular acceleration of the wheels, the vertical acceleration of the vehicle, and the torque of the front and rear wheels of the vehicle, and combining the three-degree-of-freedom dynamics model of the vehicle to construct the unscented Kalman filter algorithm, the vehicle longitudinal Speed, front and rear wheel speeds are used as system observations, and vehicle front and rear wheel torques are used as system inputs to realize online estimation of vehicle parameters such as vehicle mass and center of gravity position.
[0031] This method is about the vehicle mass m, cent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com