Calibration method of geometric position relationship between X-ray machine and detector based on tomography
A calibration method and tomographic imaging technology, applied in the field of radiation imaging, can solve problems such as the influence of reconstructed image quality, the inability to accurately know the relative positional relationship between the detector and the X-ray machine, and the inability to obtain reconstructed images, so as to eliminate blurring and improve The effect of image quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solution of the present invention will be further described in detail below according to the drawings in the description and in combination with specific embodiments. For ease of understanding, the specification first describes the X-ray tomography system.
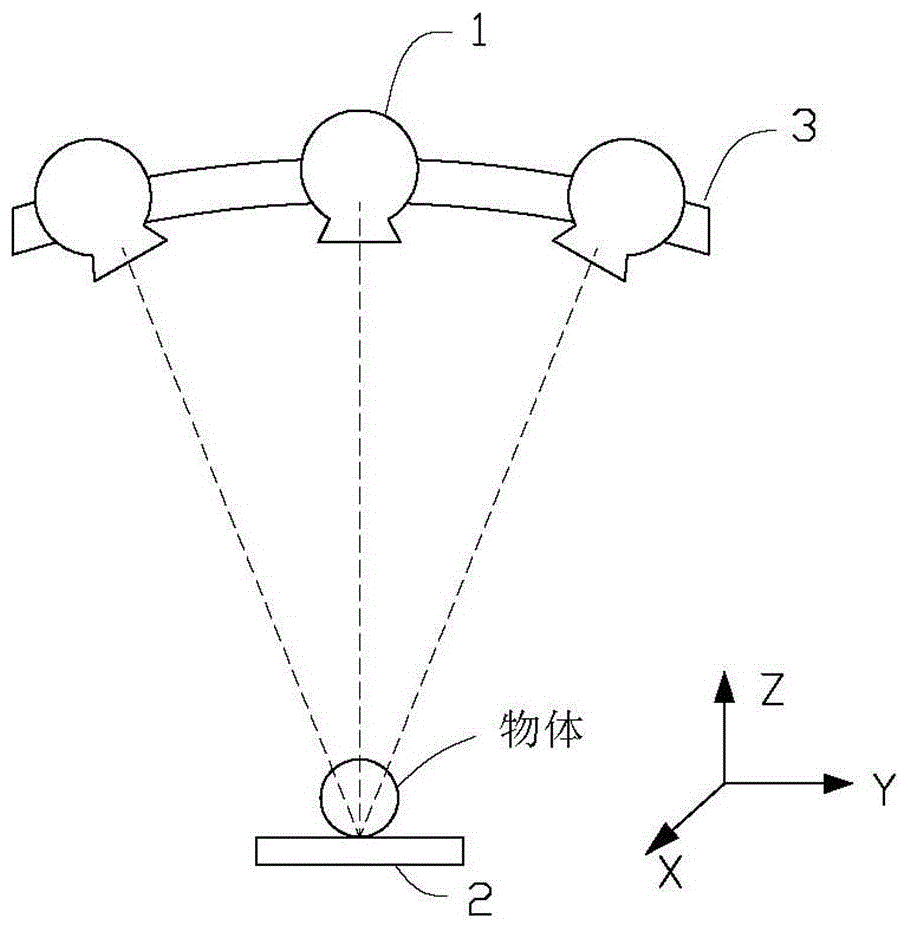
[0020] Please also refer to figure 1 , an embodiment of the present invention provides an X-ray tomography system, which mainly includes an X-ray machine 1 , an X-ray detector 2 and a track 3 . The X-ray machine 1 can move on the track 3, the X-ray detector 2 has a detector plane, the light emitted by the X-ray machine 1 is received by the X-ray detector 2, the X-ray machine 1 and the An imaging region is formed between the detector planes. When imaging, the object to be imaged is set on the detector plane. A coordinate system is established with the position of the X-ray detector 2 as the coordinate origin o, the plane where the detection plane is located as the x-y plane, and the z-axis perpendicu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com