Wheeled leg walking device with independent walking and cross-country functions
A walking device, wheeled technology, applied in the directions of transportation, packaging, motor vehicles, etc., can solve the problems of complex structure of the walking mechanism, small contact area, poor walking stability, etc., to improve off-road capability, strong off-road capability, and reduce complexity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
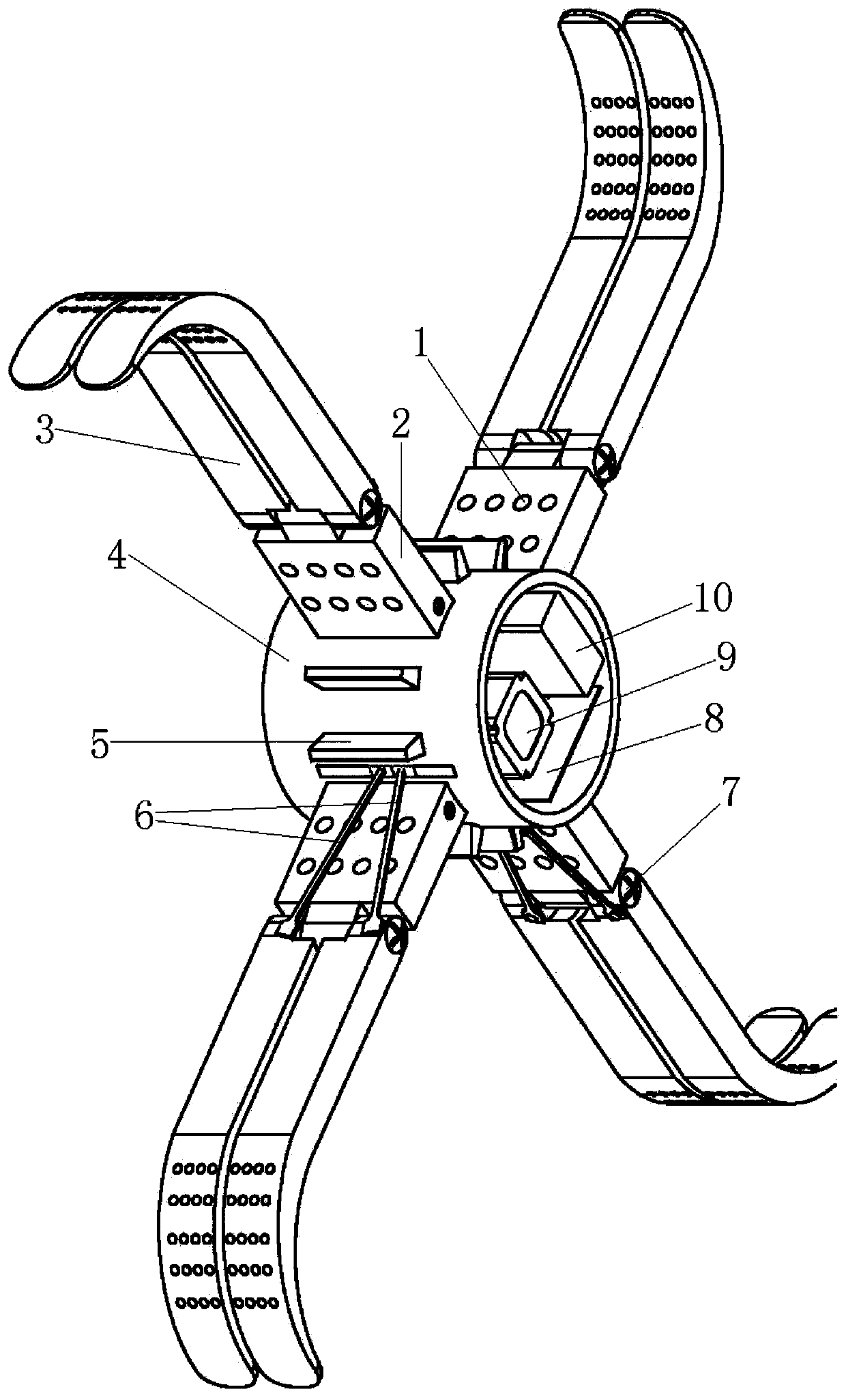
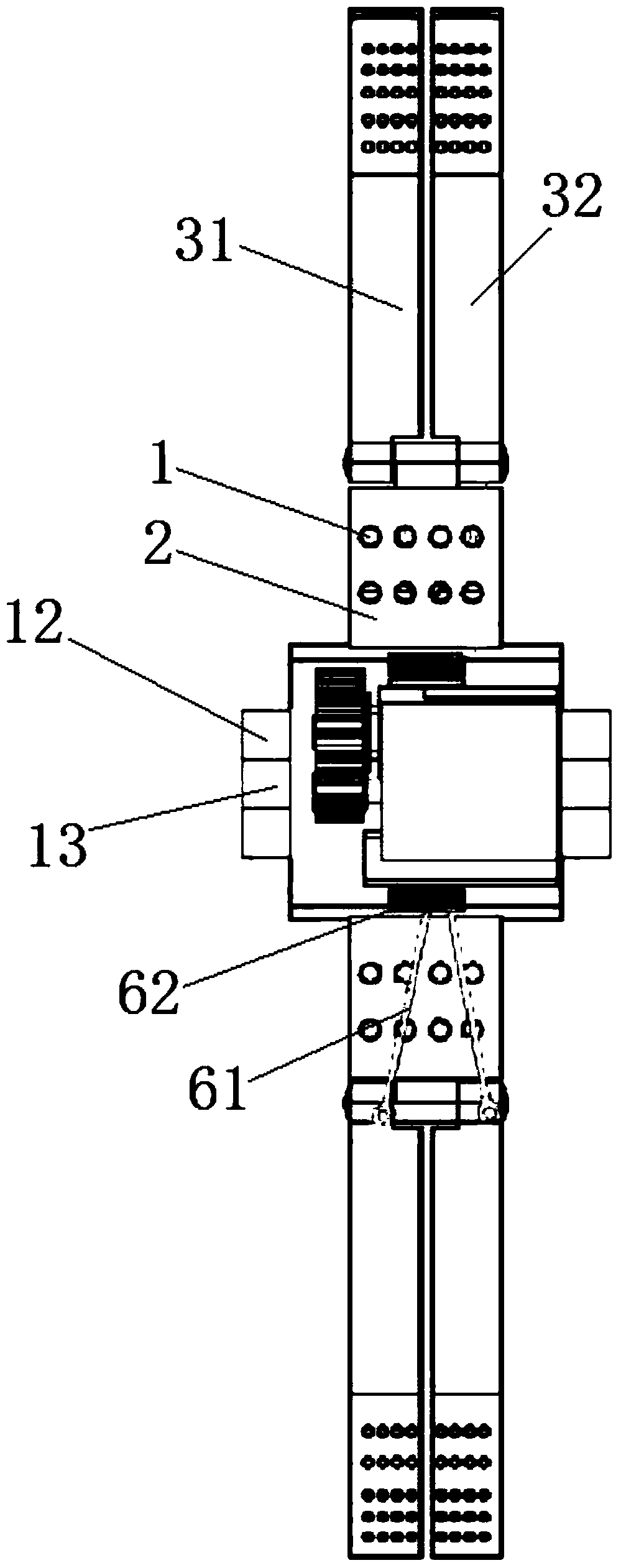
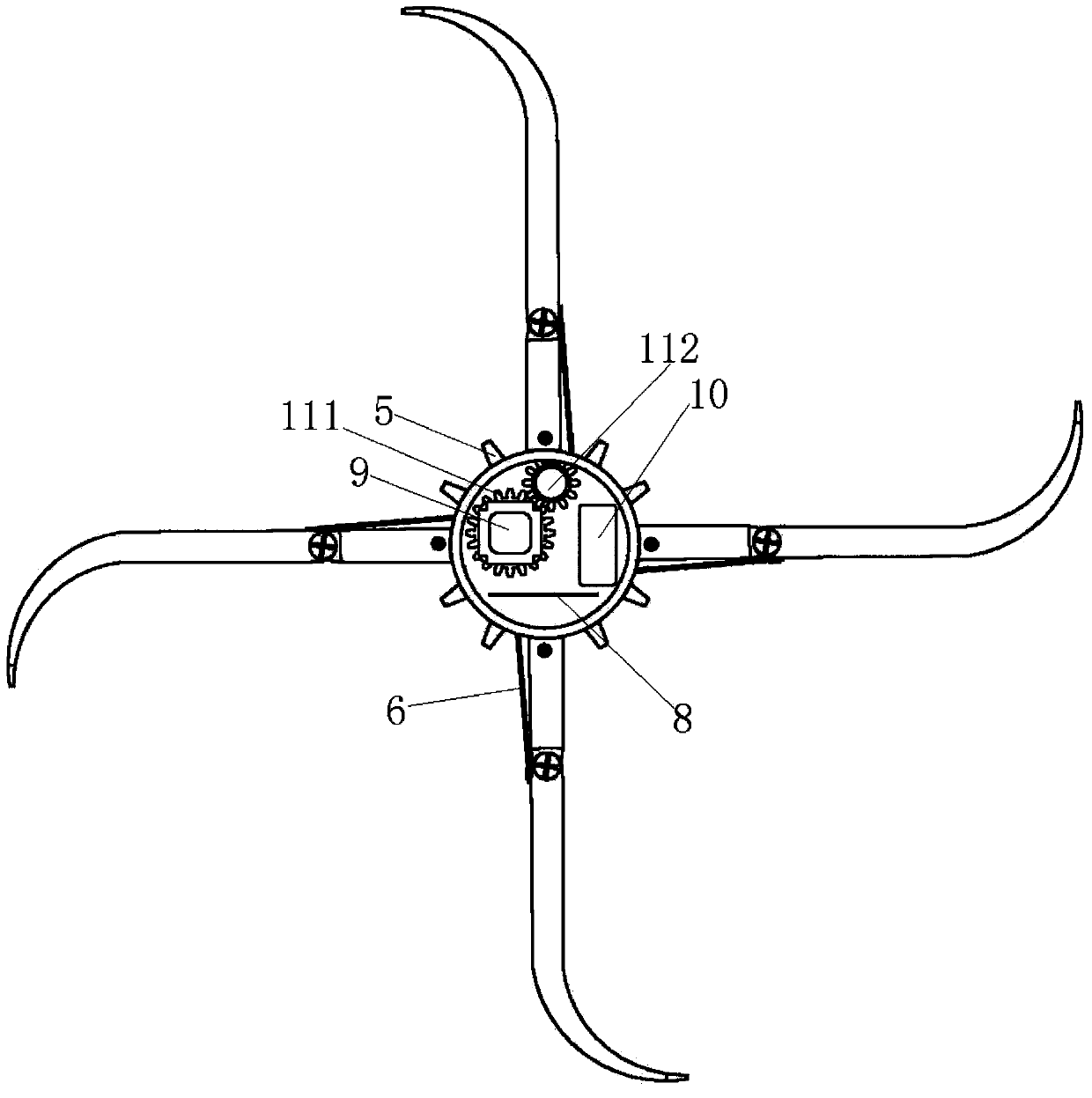
[0031] Such as figure 1 , figure 2 , image 3 and Figure 4 As shown, the present invention is realized in this way, and it comprises the power control assembly 4 that is used for walking control and power output, several leg heel assemblies 2 evenly surrounding the periphery of power control assembly 4, and leg heel assembly 2 shafts The connected foot assembly 3 for supporting walking and the steering control mechanism 6 connected between the power control assembly 4 and the foot assembly 3 for controlling turning. Wherein, the number of sole assemblies 3 is an even number, preferably 4, 6 or 12 sole assemblies 3, and as the number of sole assemblies 3 increases, the smoothness of the movement of the mechanism is better.
[0032] The wheeled leg walking device also includes an air bag 12 and an air pump 13 that are connected to the po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com