High-precision image moment positioning method
A positioning method, image moment technology, applied in the field of image processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
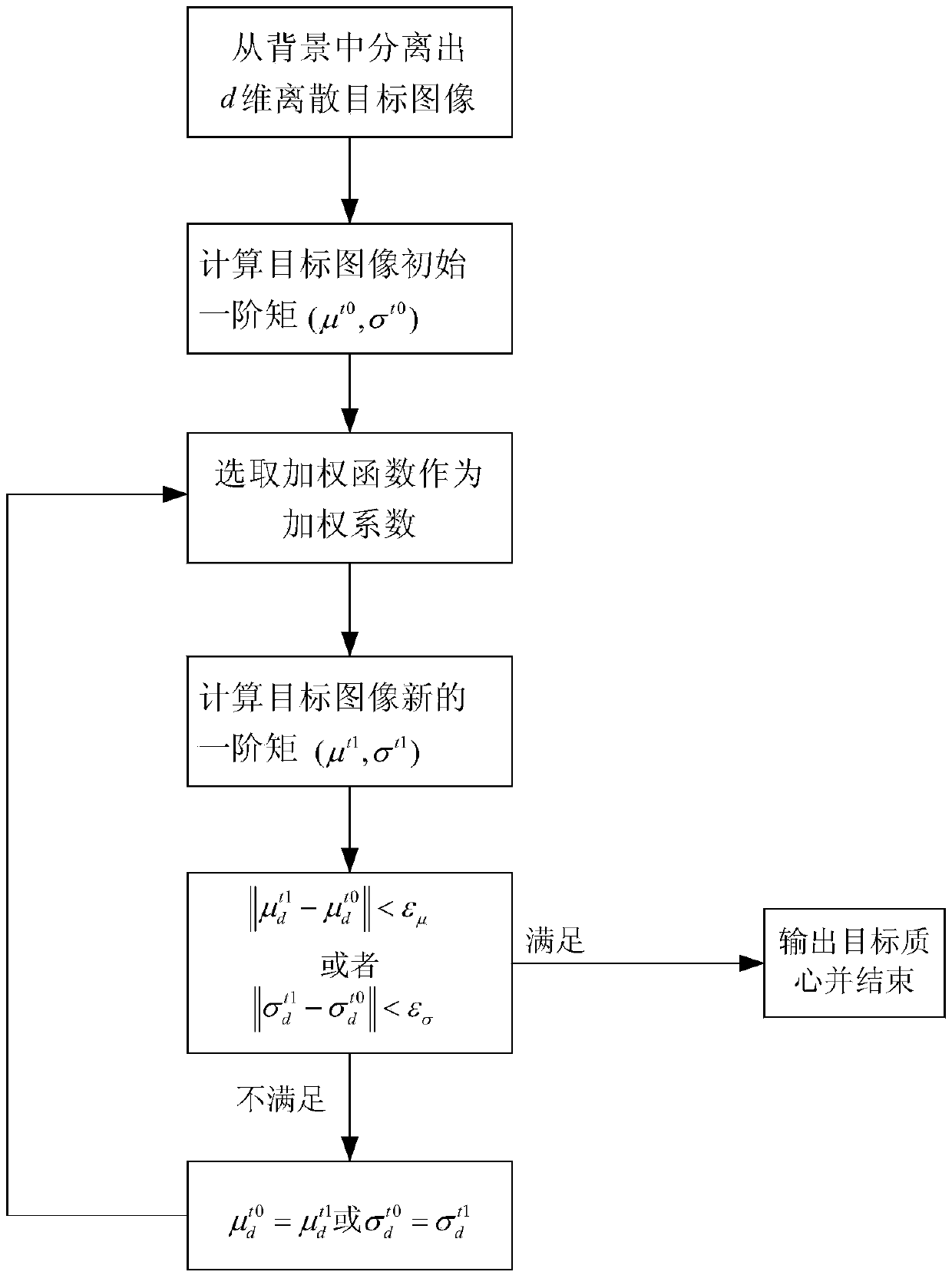
[0052] (1) Take a one-dimensional Gaussian signal For example, let I 0 =1,σ=1,ε=2e -2 , the pixel scale is 1, the abscissa axis is [-0.5,0.5], take any point X initial Generate a discrete one-dimensional histogram P(i) for the center.
[0053] (2) Use the first-order moment method to obtain the centroid of the one-dimensional histogram P(i) Order X 0 =X m , with X 0 is the initial center point.
[0054] (3) According to the principle of image similarity, the Gaussian weighting function is selected, and its parameter setting is the same as that of the Gaussian signal function in step (1), and the weighting coefficient is calculated
[0055] (4) Use the formula Calculate X 1 , compare|X 1 -X 0 |0 =X 1 , return to step (2) to calculate the weighting coefficient, and so on until |X 1 -X 0 |1 for X final .
[0056] (5) Change X initial value, repeat steps (1)-(4). Define the curve "first moment method" as X m -X initial , represents the centroid extraction ...
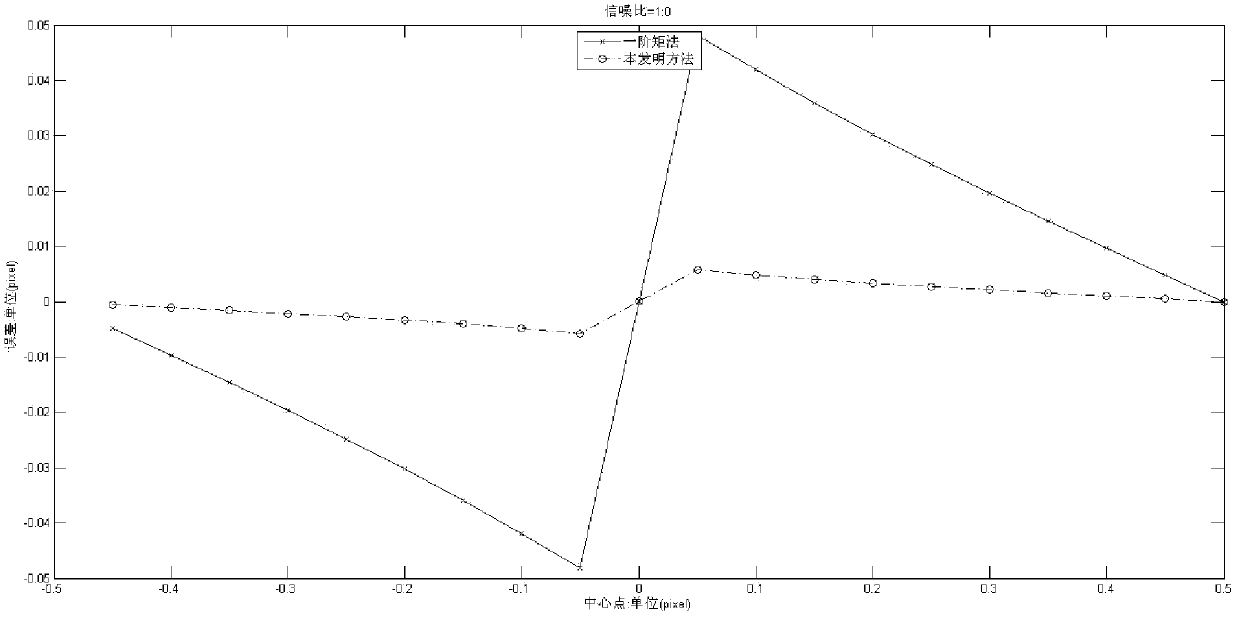
Embodiment 2
[0061] The method is the same as the step of embodiment 1, except that the initial centroid position adopted by the method of the present invention in step (1) is the center of the brightest pixel, and all the other parameters are the same as above, and the obtained results are shown in Figure 4 . From Figure 4 It can be seen that the centroid error of all sample points obtained by the method of the present invention is better than that of the first-order moment method.
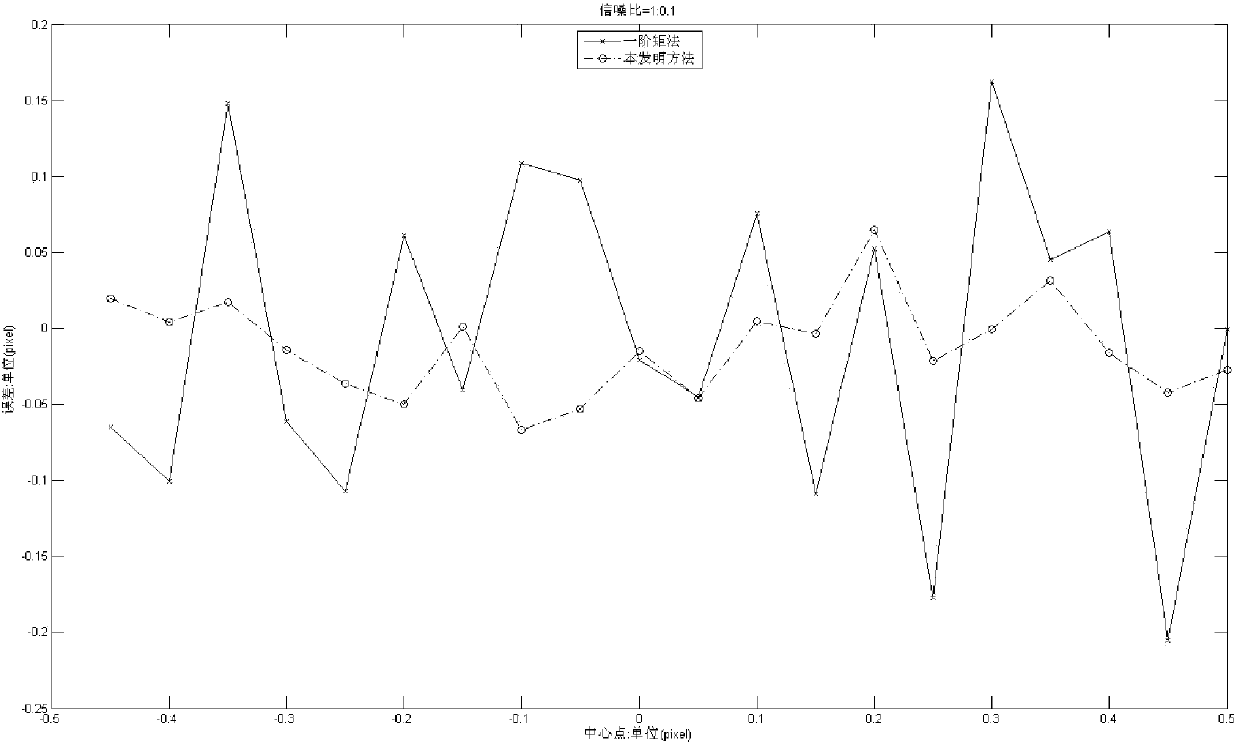
Embodiment 3
[0063] The method is the same as the step of embodiment 1, the difference is that the power weighting function ω(x)=1 / (1+|x-X 0 |), add 10% intensity white noise, the other parameters are the same as above, the obtained results are shown in Figure 5 . From Figure 5 It can be seen that, except for a few sample points, the centroid error obtained by the method of the present invention is better than that of the first-order moment method for most of the sample points.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com