Three-branched-chain six-freedom-degree robot drive mechanism
A technology of driving mechanism and degree of freedom, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc. It can solve the problems that the motion accuracy of a single branch chain affects the motion form of the moving platform, it is difficult to achieve the application effect, and the control method is complicated, etc., to achieve a simple structure Reliable, well-designed, simple motion effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
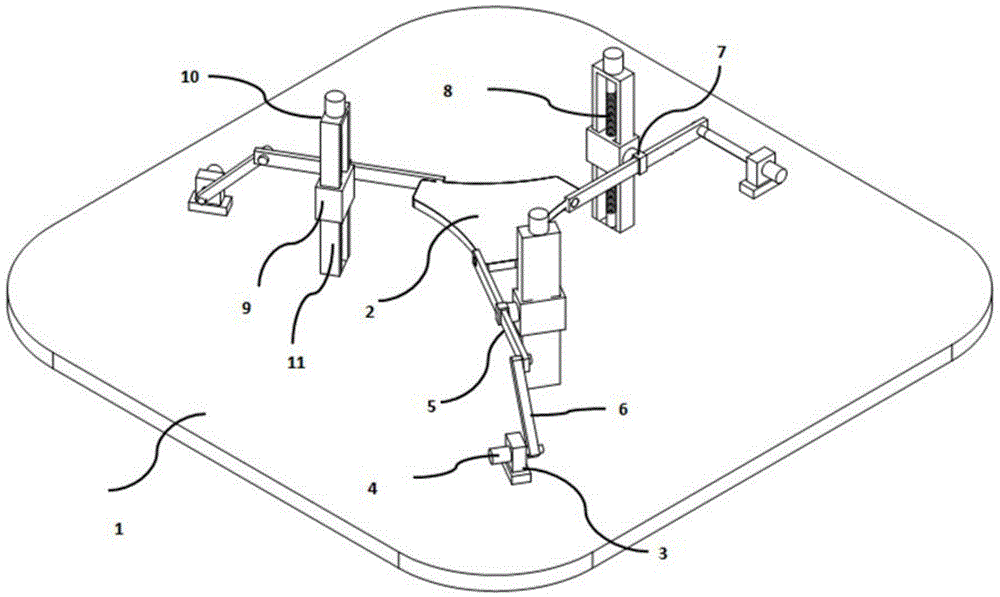
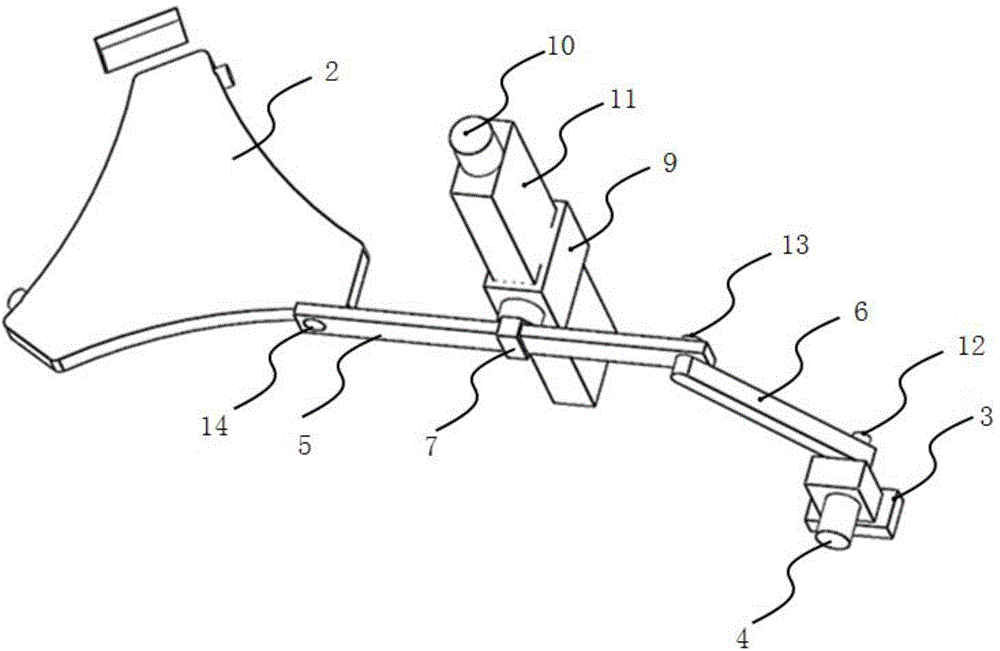
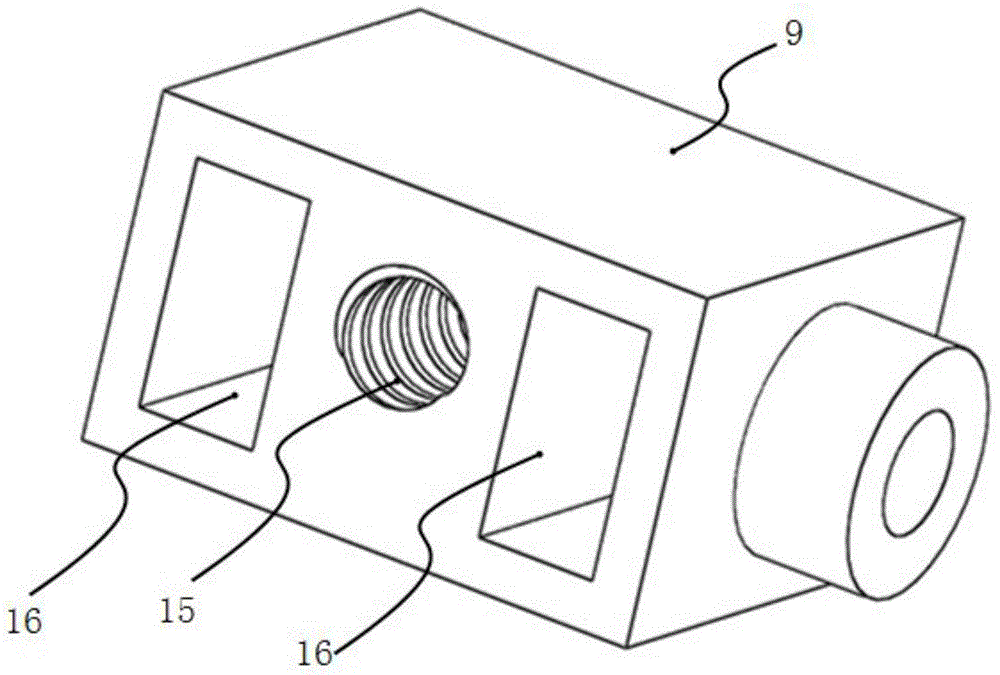
[0022] A three-branched six-degree-of-freedom robot drive mechanism, such as Figure 1 to Figure 5 As shown, it includes a moving platform (2) and a fixed platform (1) on which actuators are installed, and three branch chains with the same structure are installed between the moving platform (2) and the fixed platform (1). Each branch chain includes a fixed platform motor bracket (3), a fixed platform motor (4), a first connecting rod (5), a second connecting rod (6), a connecting sleeve (7), a lead screw (8), a slide Block (9), guide rail top motor (10) and sliding guide rail (11), the specific connection relation of described branch chain and moving platform (2), fixed platform (1) is as follows:
[0023] The fixed platform motor support (3) is evenly distributed on the fixed platform (1) along the circumferential direction, the fixed platform mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com