Low-friction low-inertia surgical instrument for minimally invasive surgical robot
A technology for minimally invasive surgery and surgical instruments, applied in the field of low-friction and low-inertia surgical instruments, which can solve the problems of difficulty in obtaining terminal contact force information, increase the risk of surgery for patients, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
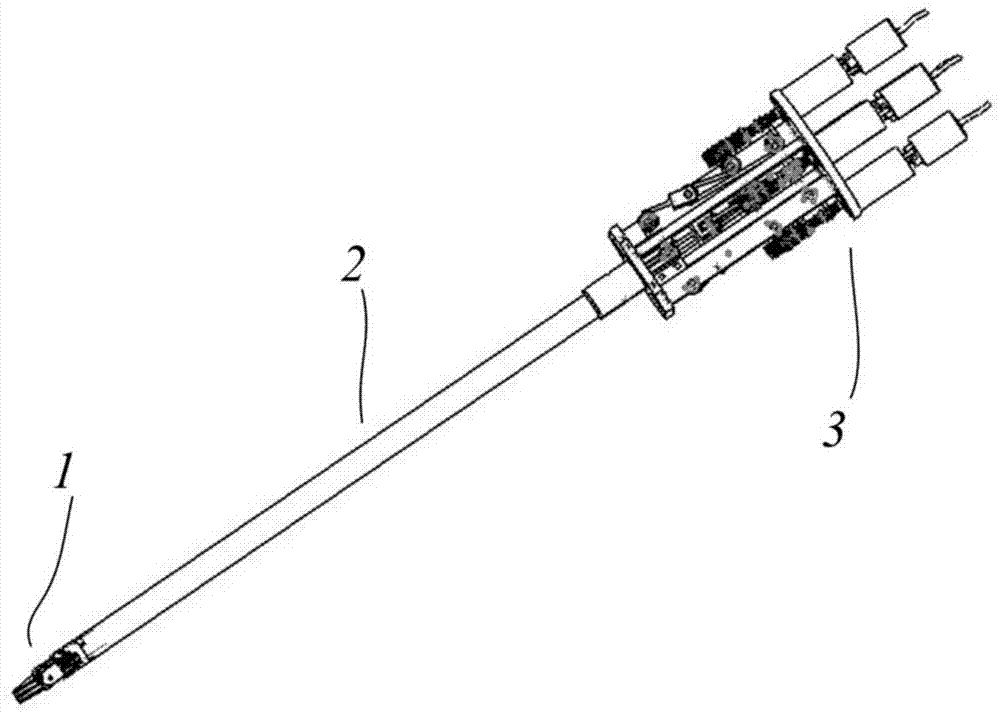
[0037] like figure 1 As shown, the low-friction and small-inertia surgical instrument for minimally invasive surgical robots includes a sequentially connected power drive part 3, a main body link part 2, and an end effector part 1; the end effector part 1 includes a finger opening and closing joints and wrist pitch joints;
[0038]The power driving part 3 is connected with the finger opening and closing joints and wrist pitching joints of the end effector part 1 after passing through the main link part 2 through the wire rope driving structure, so as to realize the finger opening and closing and wrist pitching motions of the end effector. The power drive part adopts the combination of passive wheel and driving wheel to realize the deceleration function of the servo motor, and thus increase the driving torque of the motor output shaft.
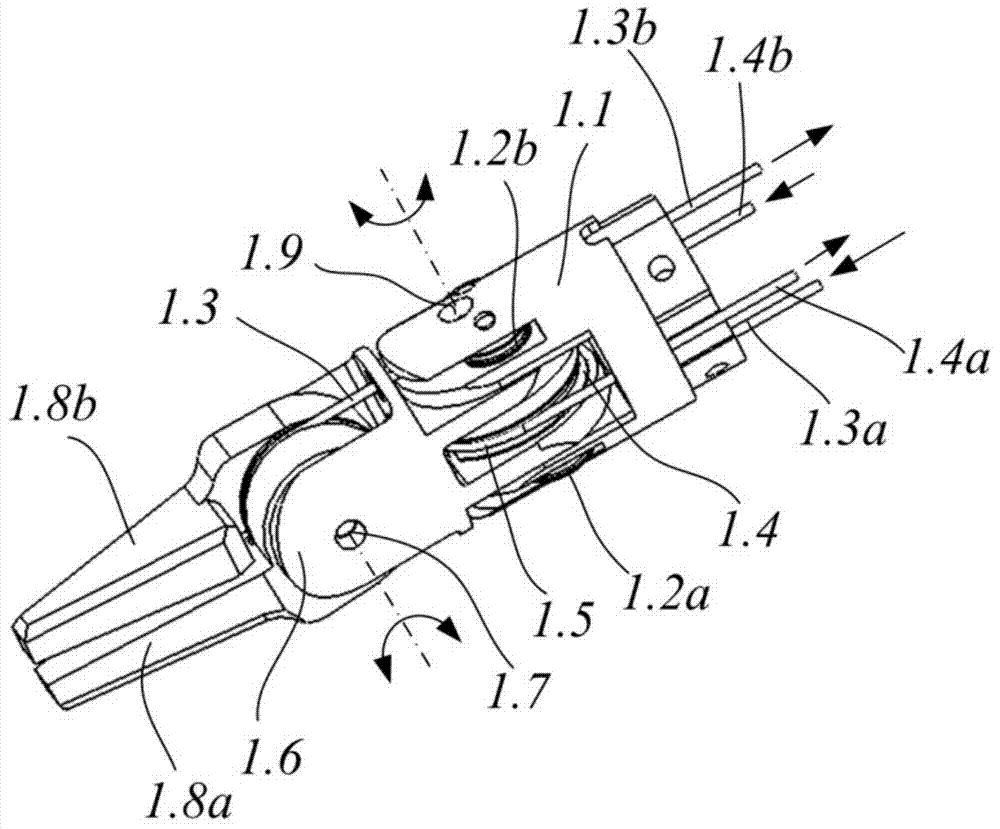
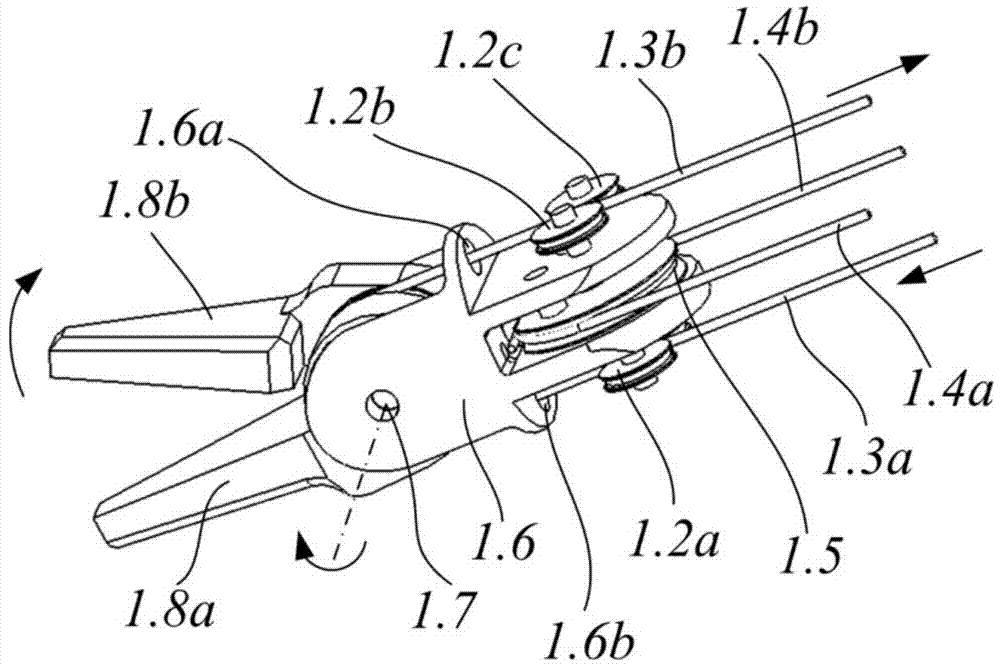
[0039] figure 2 and image 3 A schematic diagram of the finger opening and closing joints and the wrist pitching joints of the surgical in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com