Mecanum wheel-driven spherical mobile robot
A mobile robot, driven technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of inaccurate and effective control, large energy loss of spherical robots, etc., to optimize the internal structure of the sphere, simplify the charging process, and reduce energy. the effect of the loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
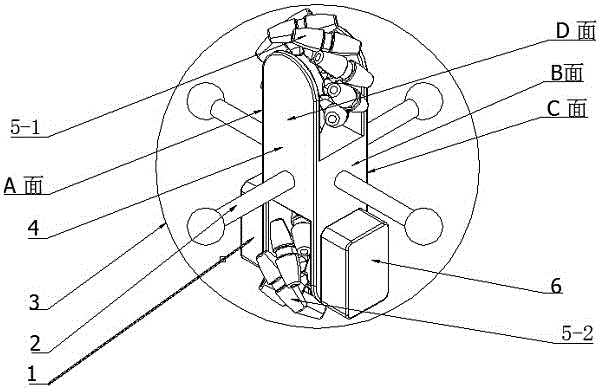
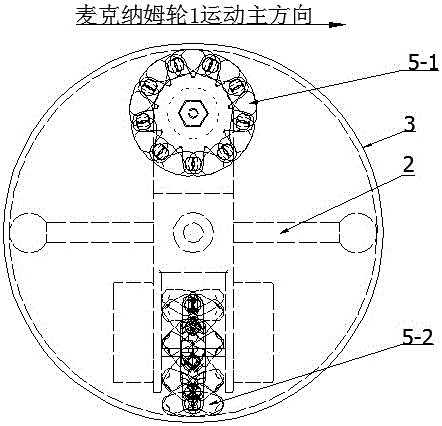
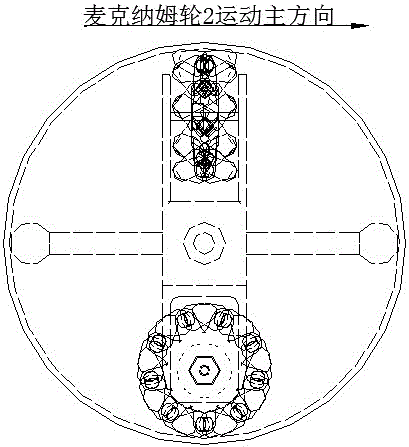
[0023] see figure 1 , the Mecanum wheel-driven active spherical robot includes: a rigid spherical shell (3), which is assembled from left and right hemispheres; 4 support rods (2); a built-in fixed frame (4); Two mecanum wheels and the hub motors inside; one main controller (6), one power supply (1). It is characterized in that the two hemispherical spherical shells (3) are finally assembled after all the components inside are installed, and all the components inside the sphere are installed on the fixed frame (4) through the frame. Guarantee the positioning relationship between each other. The two mecanum wheels and the hub motors inside them are respectively installed on both ends of the fixed frame (4) and arranged symmetrically, and the positive movement direction of the first mecanum wheel and the second mecanum wheel conforms to the vertical and orthogonal Relationship. The main controller (6) and the power supply (1) are respectively installed on the lower part of th...
Embodiment 2
[0025] This embodiment is basically the same as Embodiment 1, and the special features are as follows: the four support rods (2) are improved by commercial gas springs, and the damping effect of the gas springs can reduce the contact between the rack and the ball during the movement. The hard collision between the surfaces of the spherical shell acts as a cushioning effect. And because the contact between the wheel and the spherical shell is also a soft contact, the buffering effect between the support point and the frame also makes the mutual force between the spherical shell and the internal frame more balanced. The 4 contact points between the 4 support rods (2) and the inner surface of the spherical shell (3) and the contact points between the two mecanum wheels and the spherical shell (3) constitute a geometrically spherical 6-point contact stable structure, increasing stability of the entire robot system.
Embodiment 3
[0027] This embodiment is basically the same as Embodiment 1, and the special features are as follows: the hub motor and the mecanum wheel are integrated into one structure, the inside of the mecanum wheel is a hub motor, and the hub motor combines power, transmission and braking The devices are all integrated into the hub without redundant external mechanical structure, and the wheel surface outside the hub is a mecanum wheel structure. This hub motor technology that combines the mecanum wheel and the motor simplifies the internal operation of the sphere. Mechanical structure. The power supply uses a large-capacity lithium battery, and the power supply uses a wireless charging module as its charging device. The wireless charging receiving end and the battery are closely connected together. When charging the power supply, only the sending end and the receiving end need to be connected. The battery can be charged by just attaching the end, saving the trouble of replacing the ba...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com