Single drive linkage type lower limb power assisting exoskeleton
A linkage and single-drive technology, applied in passive exercise equipment, artificial legs, physical therapy, etc., can solve the problems of waste of functions and high cost, and achieve the effect of reducing design, reducing difficulty, and increasing the scope of application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
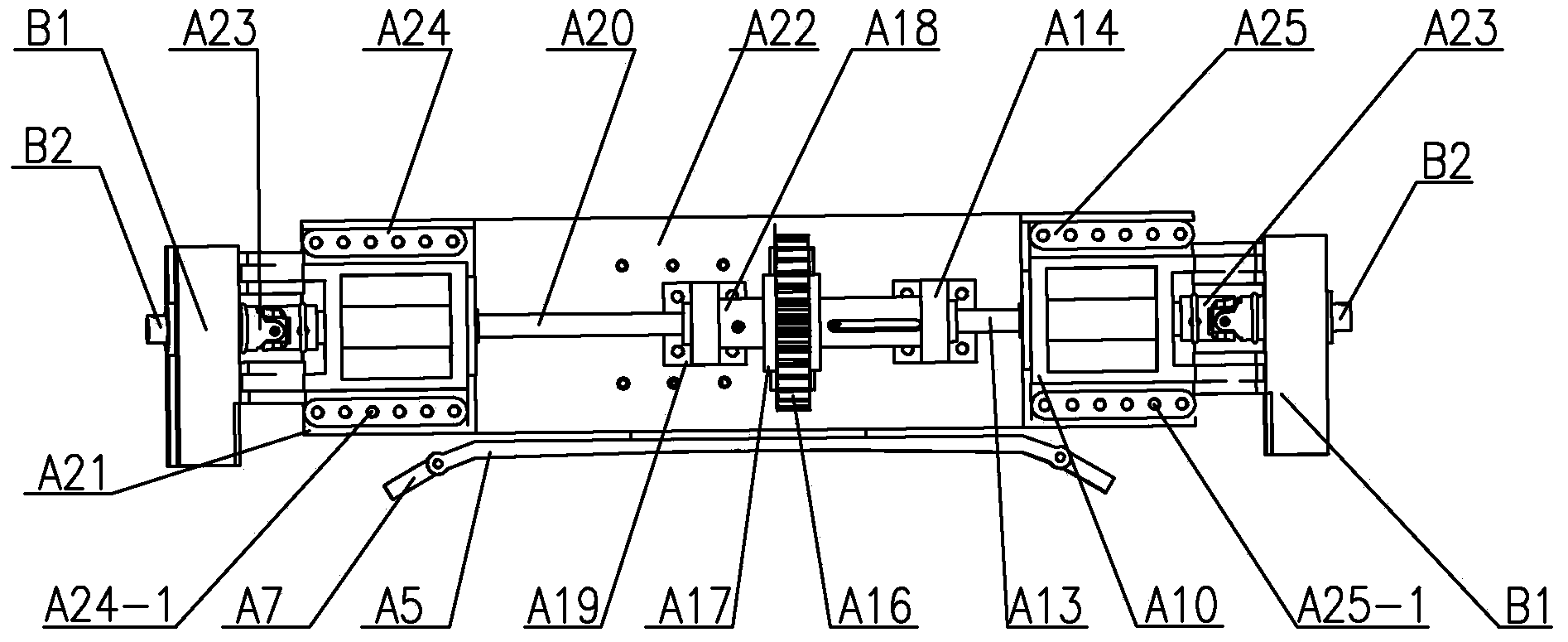
[0045] Specific implementation mode one: combine Figure 1 to Figure 15 Describe this embodiment, this embodiment includes back module A, two waist modules B, two thighs C and two calves D,
[0046] Back module A includes lithium battery A1, slot plate A2, slider A4, backboard A5, front baffle A6, rear baffle A7, motor A8, reducer A9, right back connector A10, motor seat A12, right shaft A13, right base A14, driving gear A15, driven gear A16, left base A19, expansion sleeve A17, coupling sleeve A18, left shaft A20, left back connector A21, main board A22, left connecting plate A24, right The connecting plate A25, two stoppers A3, two bearings A11 and two universal couplings A23, the lithium battery A1 and the motor base A12 are fixed on the upper end surface of the main board A22, and the lithium battery A1 and the motor base A12 are connected through wires connection, the reducer A9 is fixed on the motor seat A12, the input end of the reducer A9 is connected to the motor A8,...
specific Embodiment approach 2
[0059] Specific implementation mode two: combination figure 2 This embodiment will be described. The motor A8 of this embodiment is a DC brushless motor. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0060] Specific implementation mode three: combination figure 2 Describe this embodiment, the back module A of this embodiment also includes two backrest pins A27 and two rotating blocks A28, and the two ends of backboard A5 are respectively provided with a rotating block A28, and this rotating block A28 connects with the backrest through a backrest pin A27 Plate A5 is hinged. Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com