Plumb line deviation dynamic measurement device and method based on combination of INS and GPS
A vertical line deviation and dynamic measurement technology, applied in the field of surveying and mapping, can solve problems such as non-optimal algorithms, low compensation accuracy, and poor reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
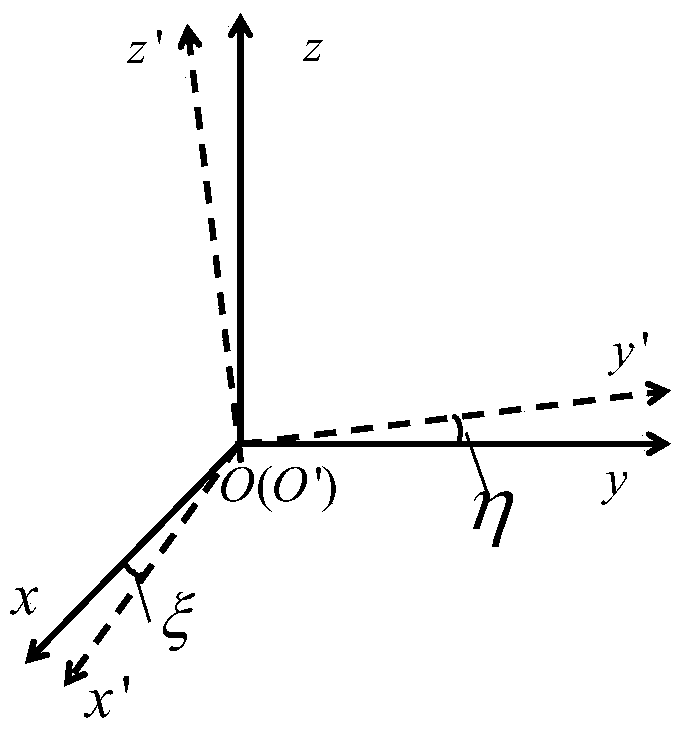
[0098] Step 5: Establish the observation equation and state equation for vertical deviation measurement, and extract the vertical deviation by using the Kalman filter method with the assistance of the global gravity model. The specific implementation method is as follows:
[0099] Record the true eastward vertical deviation of the carrier's position at the time of measurement t as η, and the northward vertical deviation as ξ, and the eastward and northward vertical deviations calculated by the global gravity model are recorded as The global gravity model uses the EGM2008 global gravity model, and the calculation program and usage method of the global gravity model can be obtained from " http: / / earth-info.nga.mil / GandG / wgs84 / gravitymod / index.html Obtained from the website. The eastward and northward vertical line deviation errors calculated by the EGM2008 global gravity model are denoted as δη and δξ, respectively, and satisfy the relationship of formula (3):
[0100] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com