


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method for achieving collaborative driving of vehicle fleet by means of semi-physical simulation technology
A semi-physical simulation and collaborative driving technology, applied in the traffic control system, general control system, instrument and other directions of road vehicles to achieve the effect of increasing operability, improving efficiency and reducing risks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The specific implementation of the present invention will be described in detail below in conjunction with preferred embodiments.
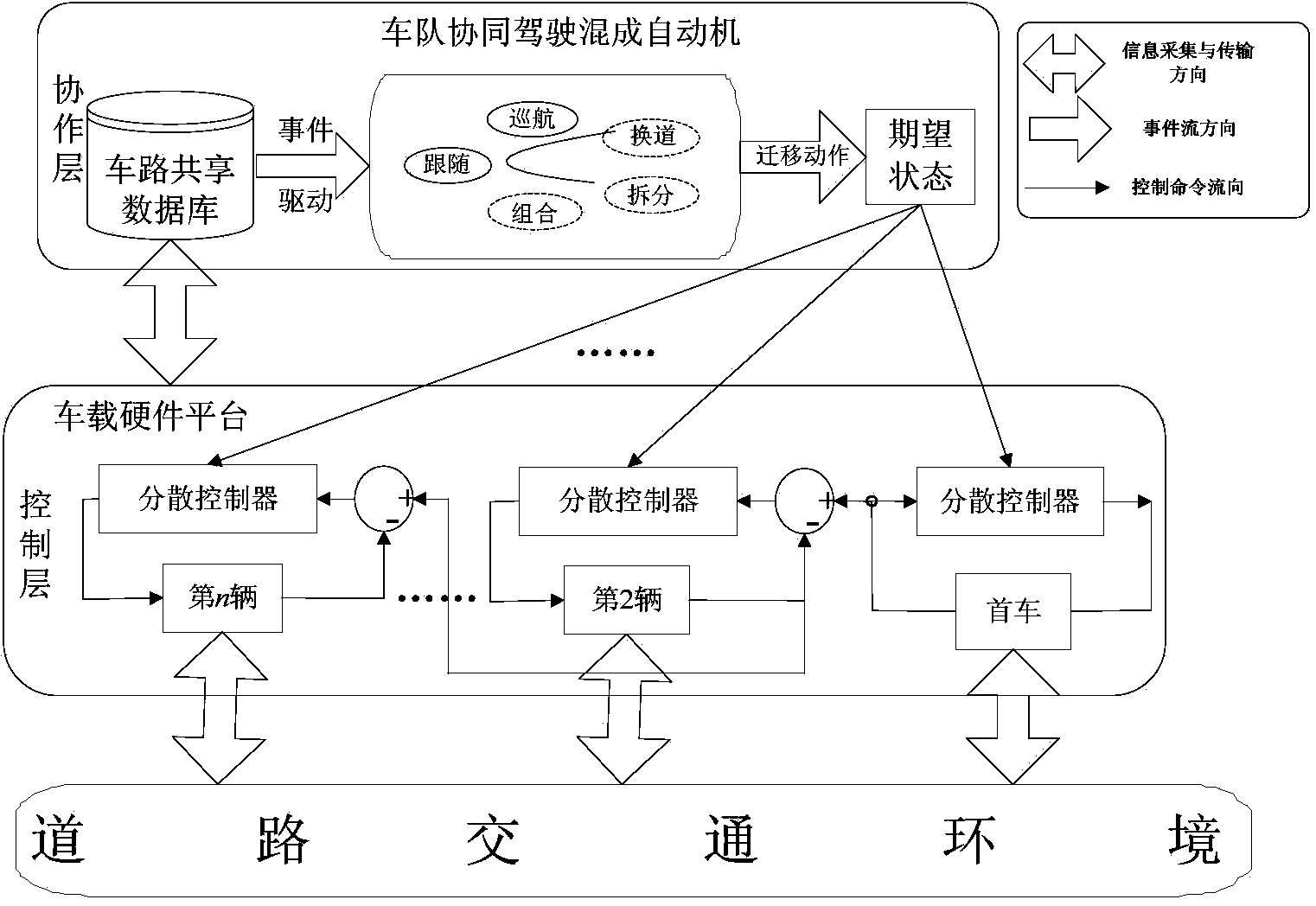
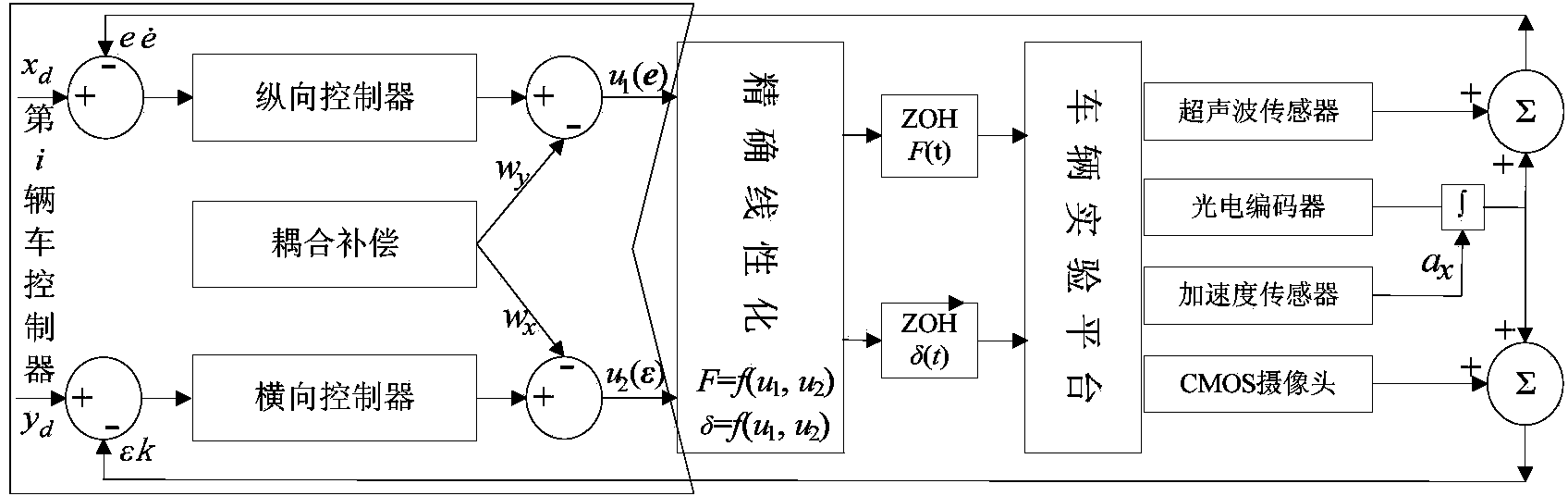
[0027] Such as figure 1 As shown, the overall schematic diagram can combine the road traffic environment and the fleet experimental platform into a fleet cooperative driving system. The system includes the hierarchical physical structure of the coordination layer and the control layer, and the three kinds of information structures for transmission listed in the figure. In general, the camera for collecting road markings uses the USB bus, the ultrasonic sensor for collecting inter-vehicle distance uses the SCI bus, the photoelectric encoder for measuring the vehicle speed uses the I / O bus, and the acceleration sensor can use the SPI or I2C bus. Communication with roadside equipment uses a wireless network card or Zigbee wireless communication module. In addition, the command sending and receiving of the cooperation unit and the control uni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com