Method for detecting space moving object in dynamic environment
A technology of spatial motion and dynamic environment, applied in image data processing, instruments, calculations, etc., can solve the problems of complexity, many steps, and difficult to guarantee algorithm stability and accuracy, so as to improve the running speed, ensure real-time performance, and ensure accuracy. Effects of Sex and Reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
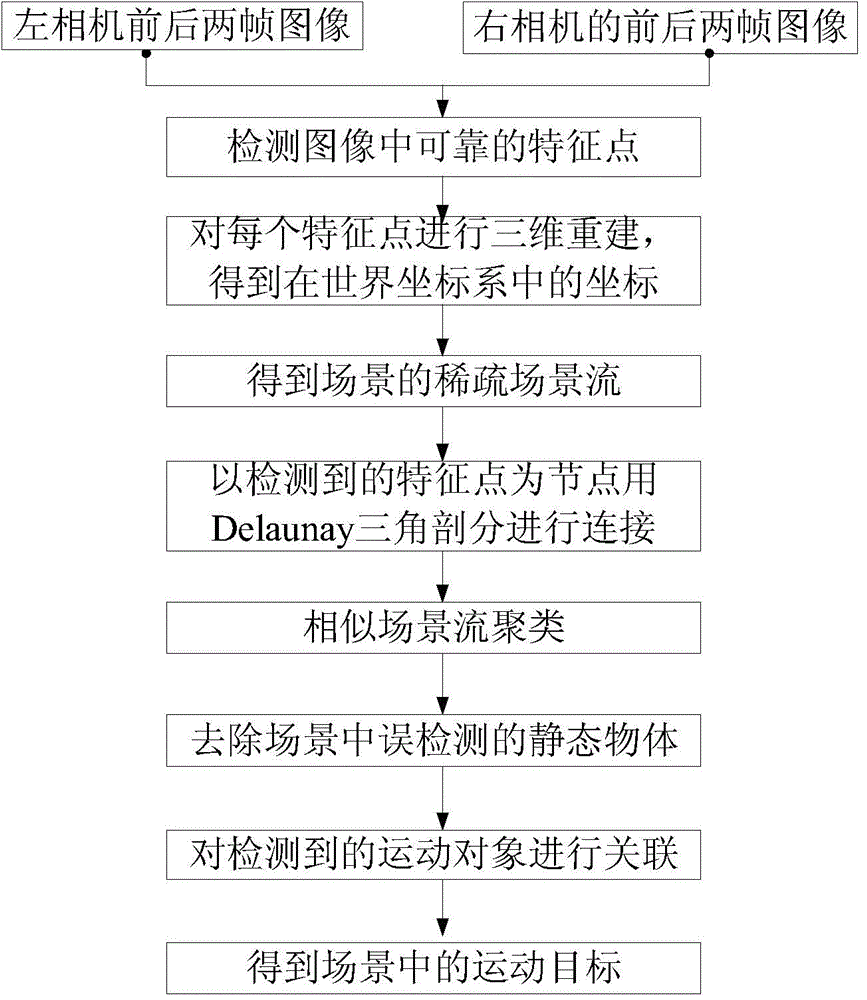
[0022] The method of the invention is mainly composed of a three-dimensional reconstruction algorithm, a sparse scene flow algorithm, a scene flow clustering algorithm, an object association algorithm and the like. The method specifically includes steps as follows:
[0023] Step 1: Obtain four images of two frames before and after the binocular camera;
[0024] Step 2: Extracting feature points from the two consecutive image pairs, and retaining those corresponding reliable feature points in the four images;
[0025] Step 3: Use the parallax of the left and right images to perform 3D reconstruction on each feature point to obtain the coordinates of each feature point in the 3D world coordinate system;
[0026] Step 4: By calculating the finite difference of 5 3D positions detected by each feature point in 5 time intervals, the scene flow is approximated;
[0027] Step 5: use the detected feature points as nodes to connect using Delaunay triangulation;
[0028] Step 6: Deter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com