Unmanned surface vehicle trajectory tracking control device and method based on nonlinear control theory
A non-linear control and trajectory tracking technology, applied in two-dimensional position/channel control and other directions, can solve the problems of high cost of propulsion and large energy consumption of the system, reduce energy consumption and manufacturing cost, ensure reliable operation, improve The effect of boosting efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
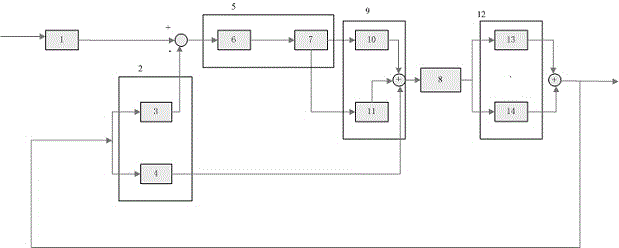
[0028] see figure 1 , the unmanned ship trajectory tracking control device based on nonlinear control theory, including reference path generator (1), state sensor (2), differential converter (5), parameter estimator (8), virtual controller (9 ), longitudinal thrust and bow turning moment controller (12), characterized in that: the output of the reference path generator (1) and the state sensor (2) is sequentially transformed by differential transformation (5), virtual controller (9), The parameter estimator (8) and the longitudinal thrust and sensor (12) are connected to the output port; the output of the longitudinal thrust and bow moment controller (12) is also connected to the state sensor (2), and the output of the state sensor (2) is also Connected to the virtual controller (9); the actual position and heading angle of the UAV collected by the state sensor (2) and the reference position and reference heading angle information generated by the reference path generator (1) ...
Embodiment 2
[0030] This embodiment is basically the same as Embodiment 1, and the special features are as follows: the virtual controller (9) includes a longitudinal velocity virtual controller (10) and a bow angular velocity controller (11); the reference path generator (1 ) By giving the desired longitudinal velocity and yaw rate, the generated position and heading angle information are transmitted to the differential converter (5), and at the same time, the expected lateral velocity signal is fed back to the parameter estimator (8) and the virtual control of the yaw rate device (11).
[0031] The state sensor (2) includes a position and angle sensor (3) and a linear velocity and angular velocity sensor (4); the output of the position and angle sensor (3) is connected to a differential converter (5) and the collected information is transmitted to Differential converter (5), the output of the linear velocity and angular velocity sensor (4) is connected to the longitudinal thrust and bow ...
Embodiment 3
[0037] The unmanned boat trajectory tracking control method based on nonlinear control theory adopts the unmanned boat trajectory tracking control device based on nonlinear control theory to operate, and it is characterized in that the operation steps are as follows:
[0038] a. The reference path generator (1) generates the desired trajectory through the reference input, and obtains the desired position, heading angle and speed information;
[0039] b. The position angle sensor (3) collects the position and course angle information of the unmanned boat, and transmits the expected position, course angle and current state information to the differential converter (5);
[0040] c. The differential converter (5) includes a geodetic coordinate to hull coordinate converter (6) and an underactuated term compensator (7). The geodetic coordinate to hull coordinate converter (6) obtains the state variables in the hull coordinate system, and converts the intermediate The variable inf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com