Real-time high-precision position solution method for multilateration system
A multi-point positioning, high-precision technology, applied in the direction of navigation calculation tools, etc., can solve the problems of uncontrollable cost, optimal balance between real-time and positioning accuracy, reduced positioning accuracy, non-compliance with multi-point positioning system over-the-horizon, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
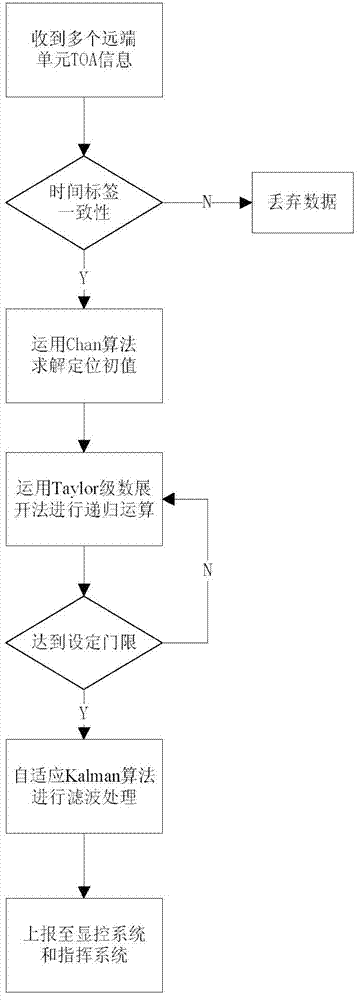
[0087] Such as figure 1 As shown, the present invention mainly adopts Chan algorithm, Taylor series expansion method, self-adaptive Kalman filtering algorithm to jointly carry out target location, and the remote unit of multipoint positioning system is made up of a main unit and a plurality of secondary units, and its main steps are: First, the central processing unit of the multilateration positioning system stores the received remote unit information in the cache, and judges the time tag consistency to filter out valid information; second, using the Chan algorithm has a relatively small calculation amount and a relatively fast solution speed The feature of fastness is to first process the effective information and calculate the initial value of target positioning; thirdly, substitute the initial value of target positioning into the Taylor series expansion method to perform recursive operation to obtain high-precision positioning information; fourthly, use the automatic Adapt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com