A humanoid neck parallel robot and method for controlling the robot
A control method and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem of difficult implementation of motion control, and achieve the effect of reducing the difficulty of entry, simplifying operation and flexible operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The patent of the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
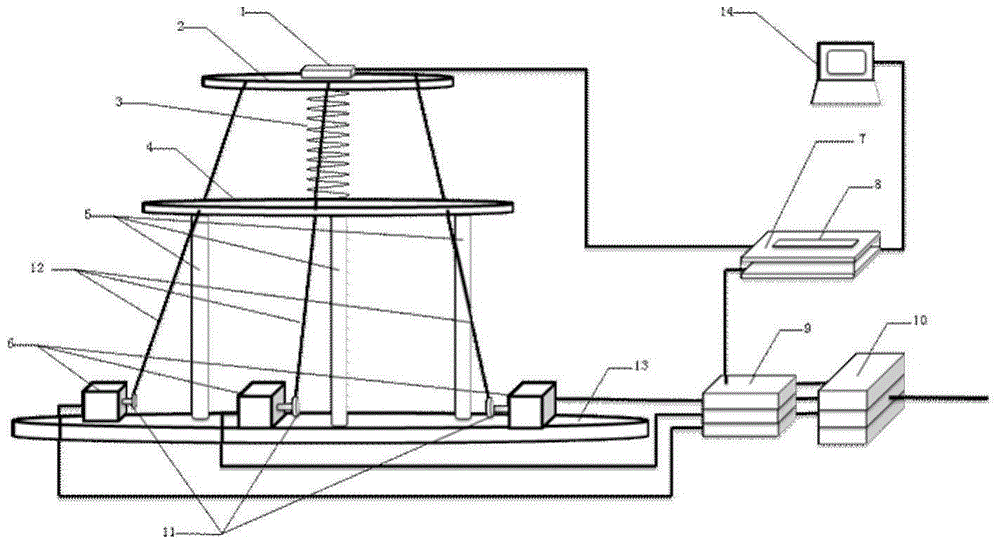
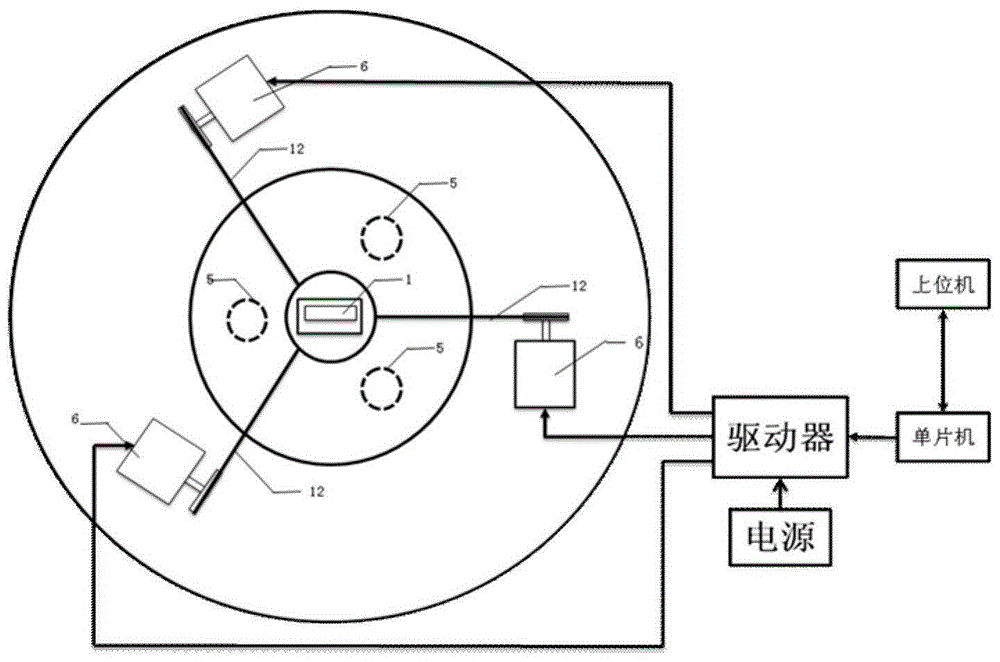
[0025] In the present invention, the rope-driven flexible humanoid head-neck parallel robot, its base and moving platform are connected by 3 ropes and 1 compression spring. The compression spring is used to simulate the human cervical spine as the supporting spine of the parallel robot, and the human neck is simulated by the rope. The internal muscles drive and control the robot. The external force acting on the moving platform is equivalent to the vector force and moment at the center of the moving platform. Based on the force and moment balance conditions, combined with the lateral bending equation of the compression spring, the inverse kinematics of the robot is solved Model. In order to minimize the driving force of the rope, the minimum average value and the minimum maximum value of the rope pulling force are the optimization...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com