Method and device for generating GPS trajectory curve
A trajectory curve and curve generation technology, applied in the field of GPS, can solve the problems of wasting server storage space, affecting the quality of curve display, redundancy, etc., and achieve the effect of eliminating zero-point drift problem, good display effect, and reducing redundant information.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
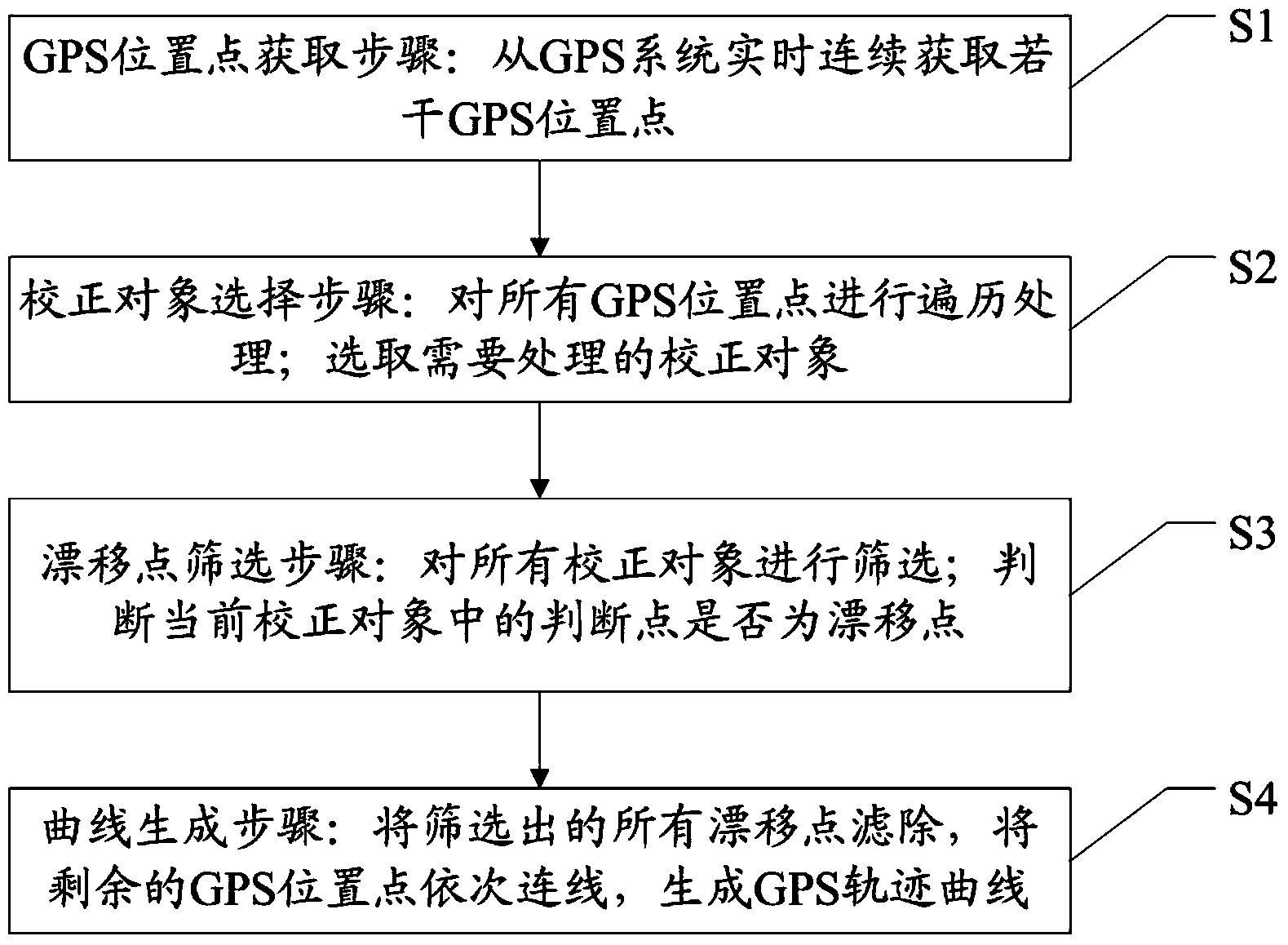
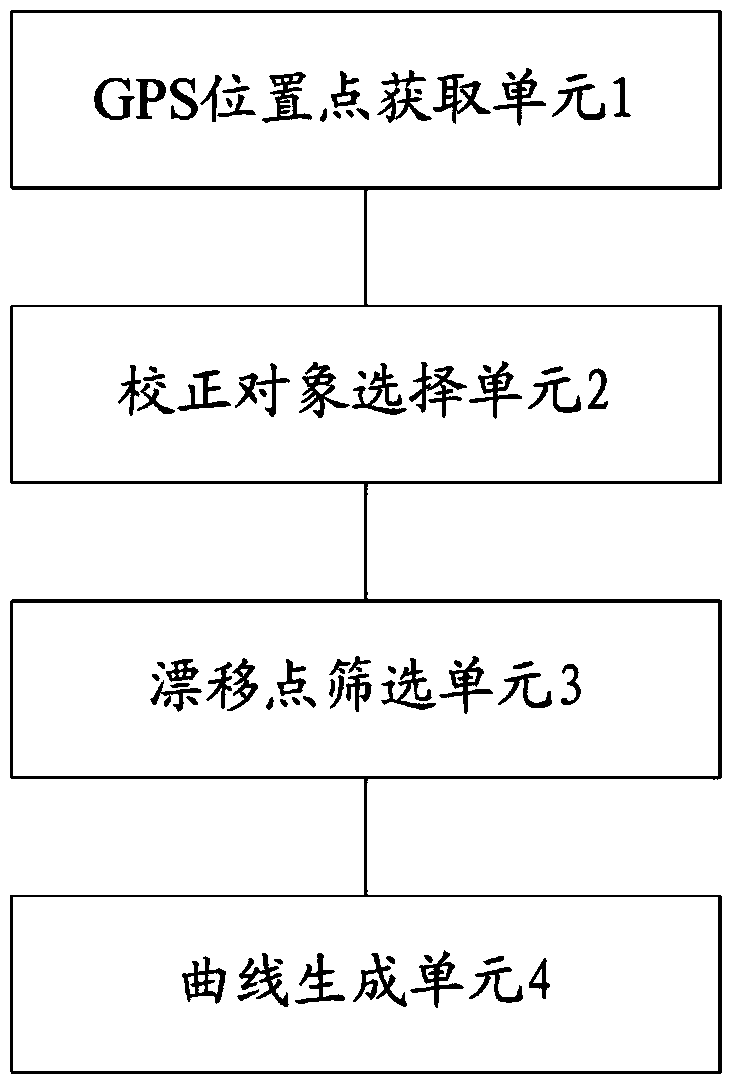
[0038] like figure 1 Shown, a kind of generation method of GPS trajectory curve, comprises the steps:
[0039] Step S1, GPS location point acquisition step: continuously obtain several GPS location points from the GPS system in real time; wherein, each GPS location point corresponds to a time value, a speed value, an accuracy value, an angle value and a two-dimensional coordinate value.
[0040] In the above parameters corresponding to the GPS location point, the time value refers to the current moment when the GPS location point is obtained, the speed value refers to the current movement speed corresponding to the GPS location point when it is obtained, and the accuracy value refers to the GPS location The GPS positioning accuracy range corresponding to the point, the angle value refers to the corresponding current movement direction angle when the GPS location point is obtained, and the two-dimensional coordinate value refers to the corresponding current position on the two-...
Embodiment 2
[0051] This embodiment provides a method for generating a GPS track curve. Compared with Embodiment 1, the difference lies in that the filtering condition includes the second filtering condition and does not include the first filtering condition.
[0052] The second filtering condition: For a group of calibration objects, calculate the angle change between two adjacent GPS position points, if all the angle changes are greater than 90°, then the processing point in the current calibration object is a drift point.
[0053] Among them, the calculation method of the angle change is as follows: among two adjacent GPS position points, set the angle value corresponding to the previous GPS position point as θ 1 , the angle value corresponding to the latter GPS position point is θ 2 , the angle change between the two adjacent GPS position points is the angle value θ 1 with angle value θ 2 The absolute value of the difference between.
[0054] Specifically, there are three consecutiv...
Embodiment 3
[0058] This embodiment provides a method for generating a GPS track curve. Compared with Embodiment 1, the difference is that the filtering conditions include the third filtering condition and do not include the first filtering condition.
[0059] The third filter condition: For a group of calibration objects, calculate the straight-line distance between two adjacent GPS position points according to the corresponding two-dimensional coordinate value, and calculate the distance between two adjacent GPS position points according to the weighted average speed and GPS time difference Theoretical distance, if each theoretical distance is less than the corresponding straight-line distance, the processing point in the current calibration object is a drift point.
[0060] In this filter condition, the reason for using weighted average speed is that the respective speed values of two adjacent points have different effects on the average speed between the two points, and it is necessar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com