Stair autonomous obstacle crossing wheel
A technology for obstacle-surmounting wheels and stairs, applied in the directions of wheels, trolley accessories, trolleys, etc., can solve the problem of not being able to realize autonomous driving, and achieve the effect of simple and reasonable structure, good obstacle-surmounting function, and force balance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with the accompanying drawings.
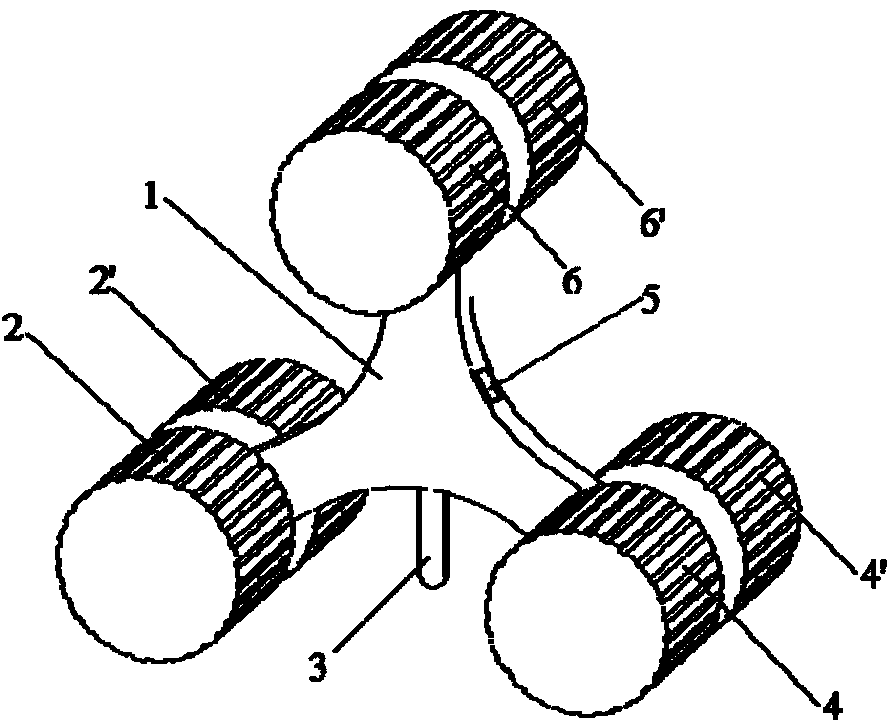
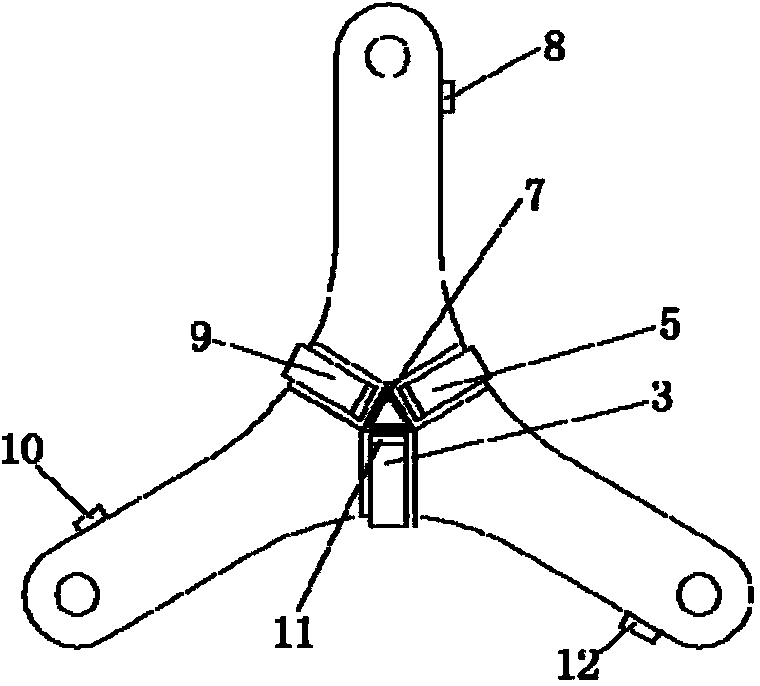
[0030] Such as figure 1 with image 3 As shown, the autonomous obstacle-crossing wheel for stairs of the present invention includes a support 1, a first drive wheel, a second drive wheel, a third drive wheel, a telescopic first electromagnetic push rod 3, and a telescopic second electromagnetic push rod 5 and the third retractable electromagnetic push rod 9;
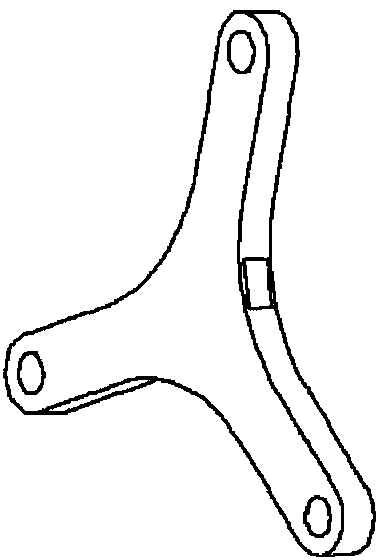
[0031] The bracket includes three legs, the heads of the three legs share an end point, which is the center of an equilateral triangle, and the tails of the three legs are respectively located at the three vertices of the equilateral triangle;
[0032] Permeable shaft holes are respectively provided at the tail edge of each leg, and the output shafts of the first drive wheel, the second drive wheel and the third drive wheel are respectively fixed in the corresponding shaft holes by interference fit;
[0033]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com