Method and device for controlling the high-precision synchronous movement of the cantilever beam of a fully automatic placement machine along the y-axis
A high-precision synchronization and placement machine technology, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve the problem of asynchronous movement speed and displacement at both ends of the cantilever beam
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
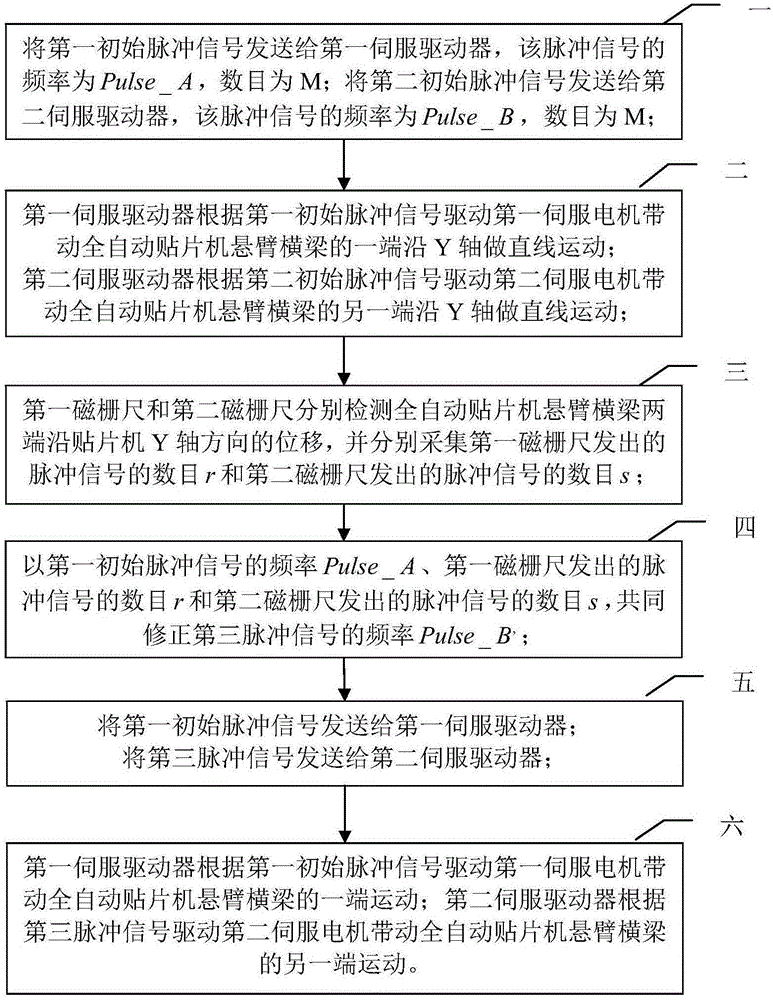
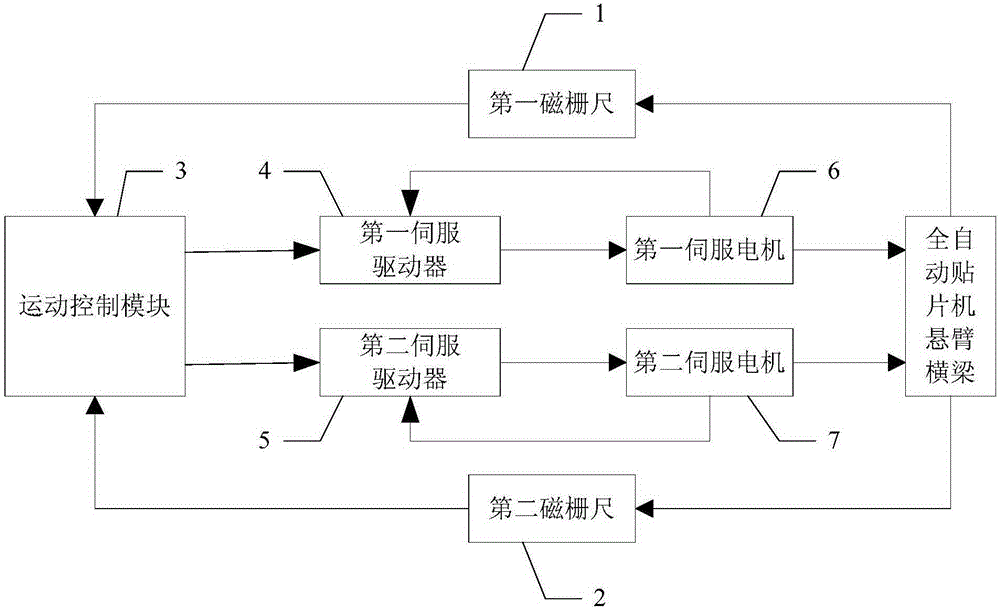
[0044] Specific implementation mode one: refer to figure 1 Describe this embodiment in detail. The method for controlling the cantilever beam of a fully automatic placement machine to move synchronously with high precision along the Y-axis described in this embodiment is implemented based on the following device, which includes: a first magnetic Scale 1, second magnetic scale 2, first servo driver 4, second servo driver 5, first servo motor 6 and second servo motor 7;
[0045] The first magnetic scale 1 is used to detect the displacement of one end of the cantilever beam of the automatic placement machine along the Y-axis direction of the placement machine;
[0046] The second magnetic scale 2 is used to detect the displacement of the other end of the cantilever beam of the automatic placement machine along the Y-axis direction of the placement machine;
[0047] The first servo driver 4 is used to drive the first servo motor 6 to move, and the first servo driver 4 also collec...
specific Embodiment approach 2
[0060] Specific embodiment 2: This embodiment is a further description of the method for controlling the cantilever beam of a fully automatic placement machine along the Y-axis with high precision and synchronous movement described in specific embodiment 1. In this embodiment, the first step is obtained in step 4. The method of the frequency Pulse_B' of the three pulse signals is:
[0061] Pulse_B'=Pulse_A+P*(r-s),
[0062] where P is the proportionality coefficient.
specific Embodiment approach 3
[0063] Specific implementation mode three: refer to figure 2 Describe this embodiment in detail. The device for controlling the cantilever beam of a fully automatic placement machine to move synchronously along the Y axis with high precision described in this embodiment includes: a first servo driver 4, a second servo driver 5, a first servo Motor 6 and second servo motor 7;
[0064] The first servo driver 4 is used to drive the first servo motor 6 to move, and the first servo driver 4 also collects the output speed and rotor position of the first servo motor 6, and the first servo motor 6 is used to drive the automatic placement machine One end of the cantilever beam moves linearly along the Y axis;
[0065] The second servo driver 5 is used to drive the second servo motor 7 to move, and the second servo driver 5 also collects the output speed and rotor position of the second servo motor 7, and the second servo motor 7 is used to drive the automatic placement machine The o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com