Tower climbing robot
A technology of robots and towers, which is applied in the field of robots, can solve the problems of unseen finished products, achieve the effects of reducing weight, compact results, and improving structural strength
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] An embodiment of the present invention will be described below in conjunction with the accompanying drawings, and the present invention will be further described through the embodiment. It should be pointed out that the specific implementation of the present invention is not limited to the forms described in the examples.
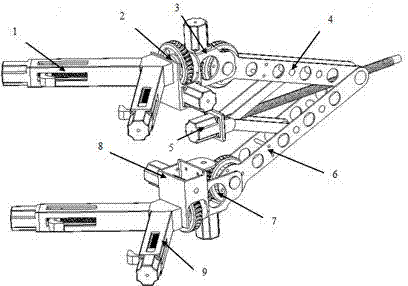
[0018] The power transmission tower climbing robot provided by the present invention has an overall structure as attached figure 1 As shown, it includes two mechanical arms 4 and 6, and a motor 5 that drives the opening and closing of the mechanical arms. The device includes a clamping claw 1 capable of clamping angle steels of different specifications and a wrist joint 2 for adjusting the posture of the clamping claw, for Connect the lower end of the arm with the pitch joints 3 and 7 of the manipulator.
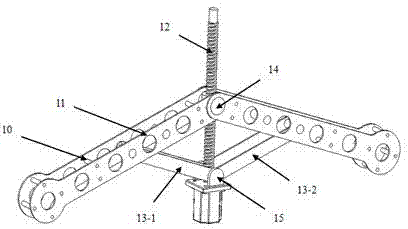
[0019] attached figure 2 It is the implementation mechanism of the robot arm. The mechanical arm is composed of a thin plate 11 and a pin 10 ....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com