


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Component supply apparatus
一种供给装置、部件的技术,应用在程序控制机械手、程序控制、仪器等方向,能够解决电力消耗大、需要机器手切换时间机器手宽阔场所、最终码放失败等问题,达到避免周期时间的延长、减小临时放置场所、缩短设计时间的效果
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0044] Below, refer to Figure 1 to Figure 5 , Embodiment 1 of the present invention will be described.
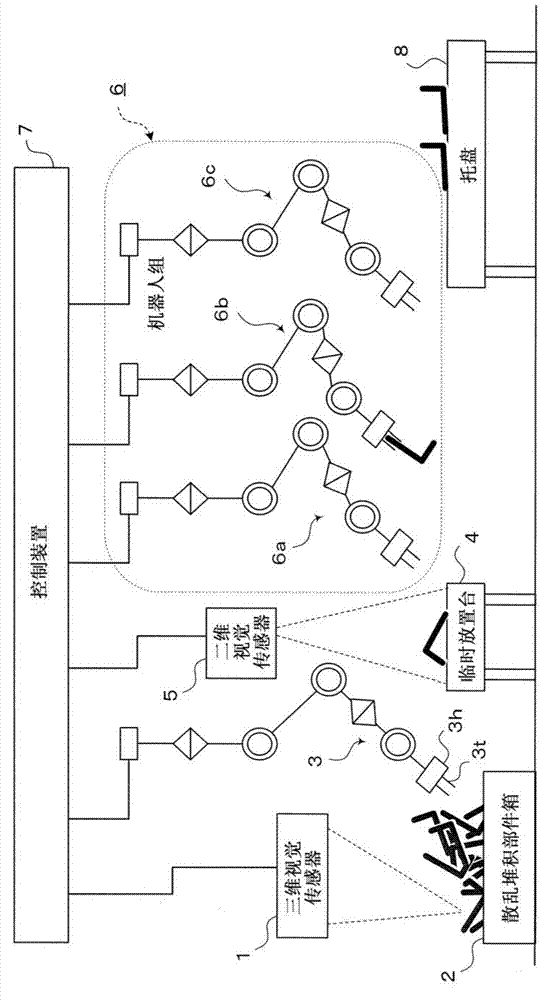
[0045] figure 1 It is a side view schematically showing the overall structure of the parts supply device according to Embodiment 1 of the present invention, and shows the stacking and supply of scattered parts using a plurality of (here, four) robots 3 , 6 a , 6 b , and 6 c Structure.
[0046] exist figure 1 Among them, the parts supply device has: a three-dimensional vision sensor 1; a scattered parts box 2, which accommodates a plurality of parts (for example, L-shaped parts); a first robot 3 (hereinafter referred to as "robot 3"), which is close to the scattered Component boxes 2 are piled up and arranged; a temporary storage platform 4 for components; a two-dimensional vision sensor 5 that photographs the temporary storage platform 4; a robot group 6 (second robot) consisting of robots 6a to 6c; a control device 7, Based on the detection results of the three-dimens...
Embodiment approach 2
[0163] In addition, in the above-mentioned Embodiment 1 ( Figure 1 to Figure 5 ), there is no particular description, but in order to optimize the success rate of grabbing the parts in the scattered parts box 2 during the action of the robot 3 associated with the three-dimensional vision sensor 1 and the control device 7, it is also possible to install A parameter optimization unit for selecting optimal parameters.
[0164] Below, refer to Figure 1 to Figure 4 , Embodiment 2 of the present invention in which a parameter optimization means is provided will be described.
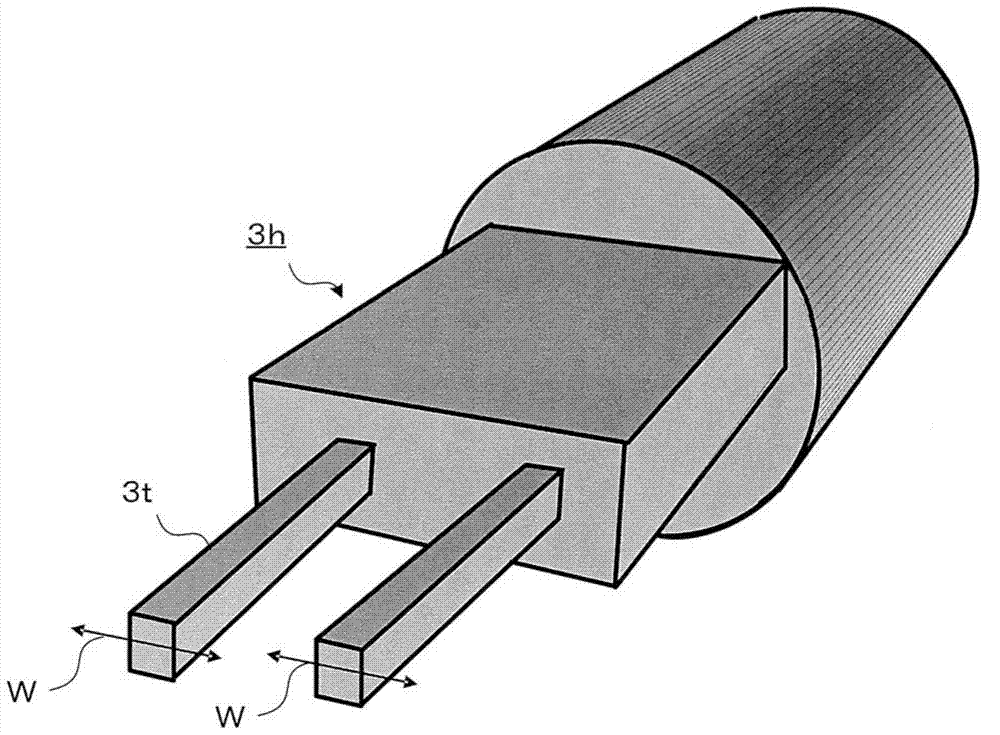
[0165] The operation of the robot 3 includes an operation of closing the claw 3t and grasping it after the robot 3 is operated so that the position and posture of the ear of the part coincide with the position and posture of the claw 3t of the robot hand 3h of the robot 3. part.
[0166] At this time, it is necessary to adjust the value of the width W, the value of the posture, and various numerical param...
Embodiment approach 3
[0193] In addition, in the above-mentioned first and second embodiments, the functions and features of each part are not collectively described, but the stacking effect of the random stacking parts according to the present invention can be realized by the following first to fifth features (functions).
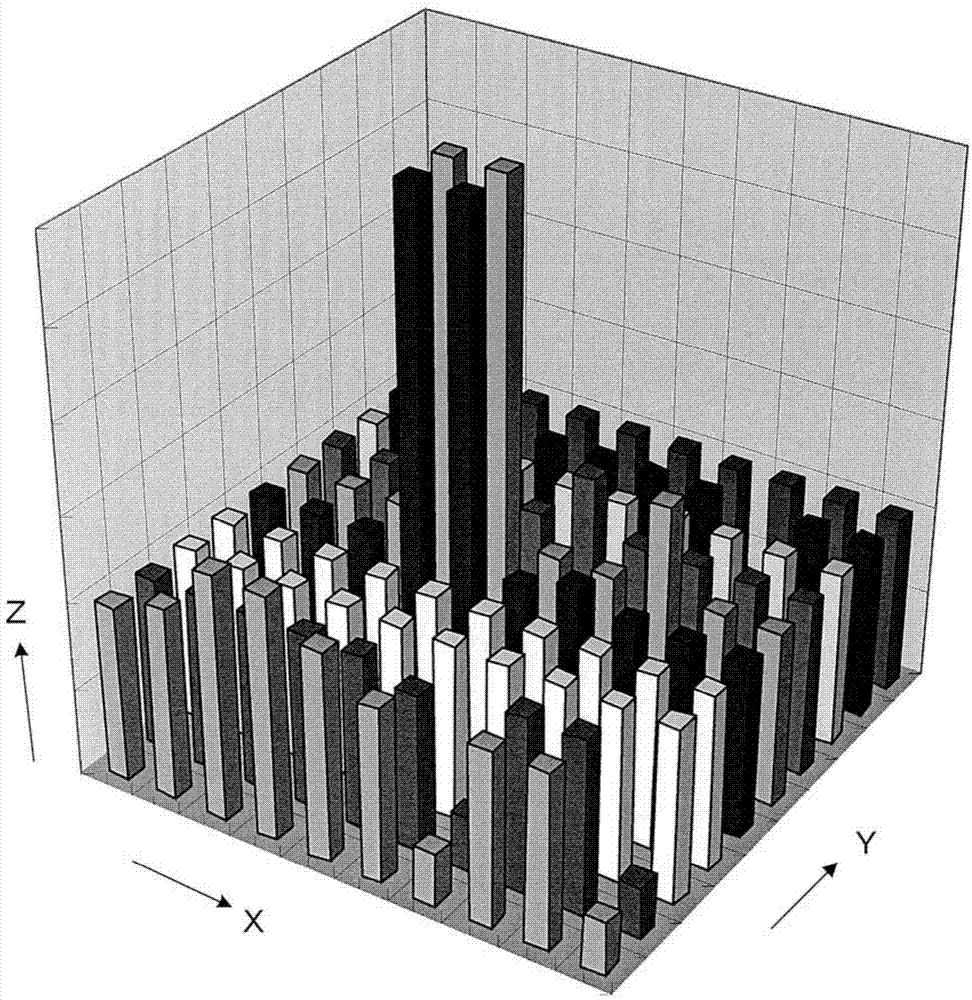
[0194] First, the first feature is that it has a distance image measuring unit composed of the three-dimensional vision sensor 1 and the control device 7 .
[0195] For example, in an existing device, a position and posture for holding a component is set in advance corresponding to the type of the component. In contrast, in the present invention, instead of setting a position and posture, it has the following function: When performing a grasping action, the three-dimensional vision sensor 1 performs measurement, and flexibly changes the grasping position and subsequent actions corresponding to the obtained measurement data.
[0196] In addition, in the present invention, the th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com