External measured speed information-based horizontal attitude error correction method for SINS (serial inertial navigation system)
A horizontal attitude and error correction technology, which is applied to navigation, measurement devices, surveying and navigation through speed/acceleration measurement, and can solve problems such as heavy debugging workload, inability to correct attitude, and convergence effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Because the inertial navigation system itself has instrument errors, initial alignment errors, gravity anomalies, etc., the navigation error diverges with time when the inertial navigation system works for a long time. Therefore, it is necessary to introduce external position information, external velocity information or external attitude information to correct the inertial navigation error.
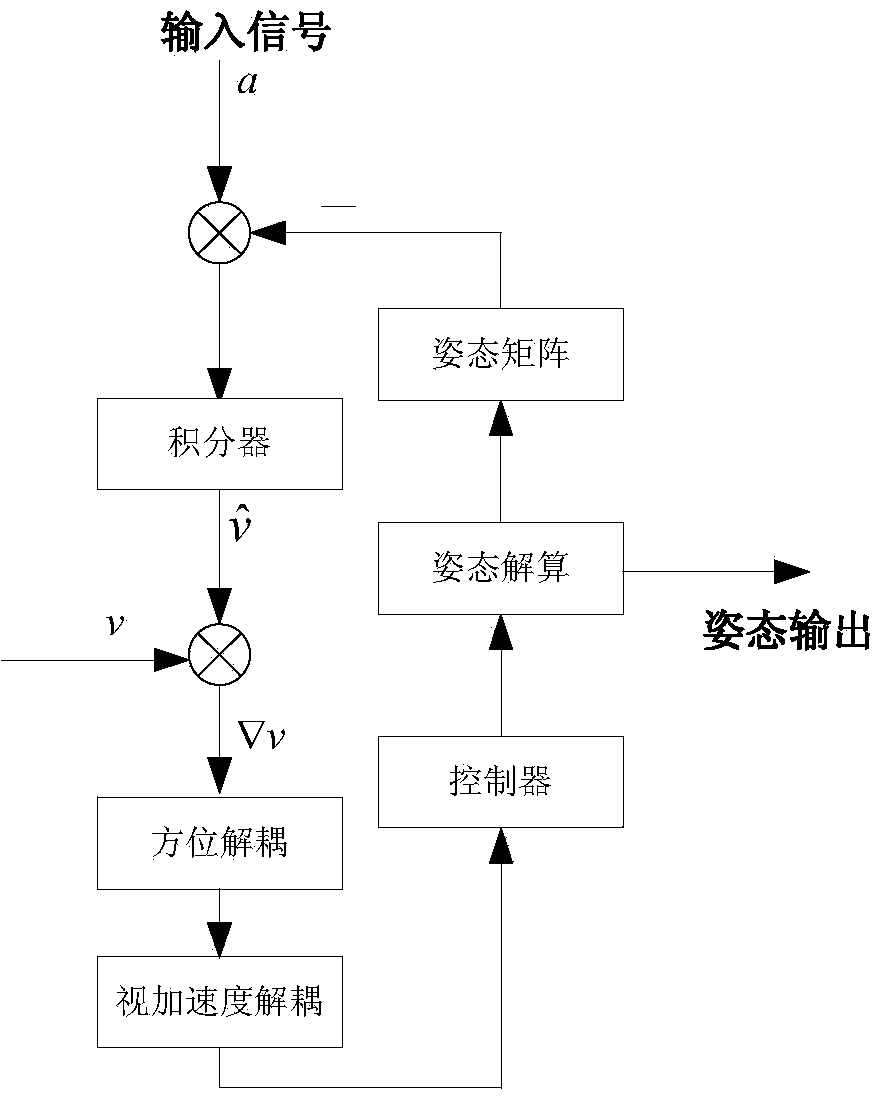
[0039] Such as figure 1 As shown, the present invention provides a kind of SINS horizontal attitude error correction method based on external measurement velocity information, and the steps are as follows:
[0040] (1) The speed measured by the inertial navigation system Make a difference with the carrier's true northward velocity V obtained by GPS to obtain a velocity error signal
[0041] (2) Perform azimuth decoupling on the speed error signal obtained in step (1), and the decoupling matrix is A;
[0042] A = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com