Telescopic cross arm of hydraulic large-sized mechanical hand
A manipulator and telescopic technology, applied in manipulators, claw arms, manufacturing tools, etc., can solve the problems of high price, high cost, poor electric drive manipulator, etc., and achieve the effect of low cost, low protection level and large movable torque.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0007] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
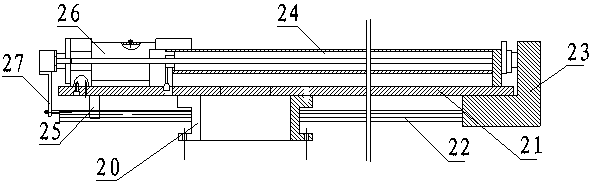
[0008] see figure 1 , the embodiment of the present invention includes:
[0009] A telescopic cross arm of a hydraulic large manipulator, the telescopic cross arm of the hydraulic large manipulator includes a telescopic slide table 20, including a base plate 21, a guide slide bar 22, a support block 23, a telescopic oil cylinder 24, and a telescopic positioner 25 and a counterweight device 26, the base plate 21 is fixed on the telescopic slide table 20, the telescopic slide table 20 is pierced with a guide slide bar 22, the right end of the guide slide bar 22 is connected to the support block 23, and the support block 23 is connected to The piston rod o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com