Assistive rehabilitation training robot for stroke hemiplegic patients
A rehabilitation training and robot technology, applied in the field of rehabilitation robots, can solve the problems of high cost and no promotion, the upper limb force can not reflect the patient's movement state well, and the six-dimensional force sensor is expensive, so as to ensure balance and reduce weight. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in detail below with reference to the accompanying drawings and examples.
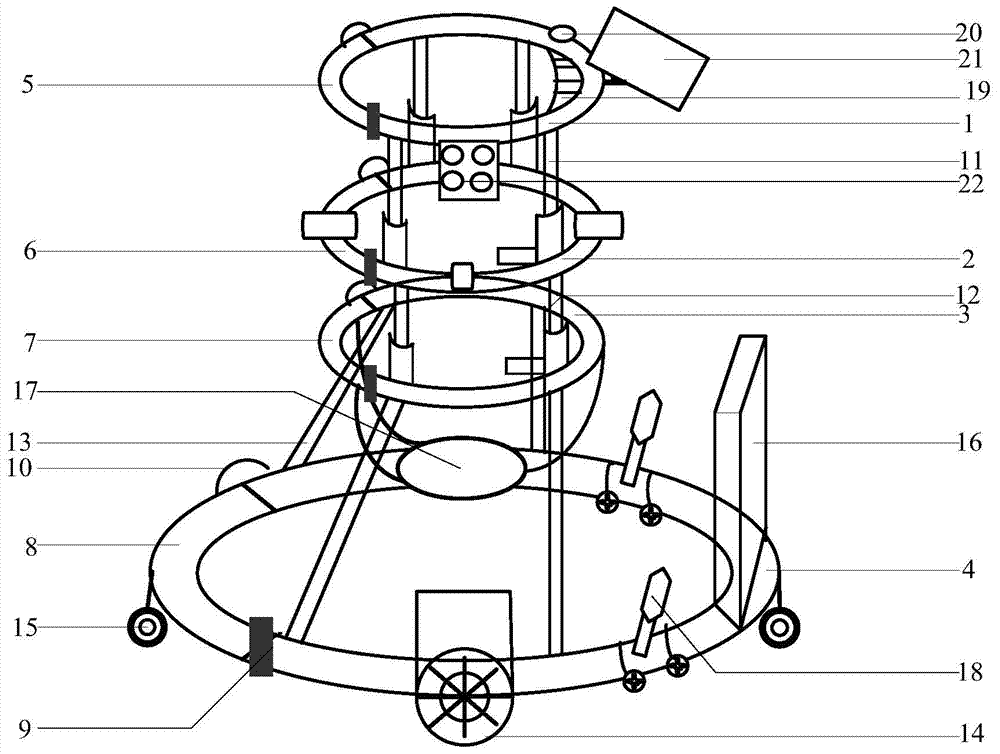
[0035] as attached figure 1 As shown, the present invention provides an auxiliary rehabilitation training robot for stroke hemiplegia patients, the robot includes an upper armrest frame 1, a middle layer detection frame 2, a lower support frame 3, a mobile chassis 4, an upper layer electric push rod 11, a middle layer electric push rod 12. Lower support rod 13, driving wheel 14, driven wheel 15, control box 16, detachable seat 17, movable foot pedal device 18, armrest board 19, emergency stop switch 20, display screen 21, operation panel 22, Tension sensors 23A- 23D, rope 24 and drive wheel drive motor 26 .
[0036] The upper armrest frame 1, the middle layer detection frame 2, the lower layer support frame 3 and the mobile chassis 4 are of the same structure, all of which are ring structures composed of a U-shaped frame and a switch frame, and the switch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com