Method for field fixed point zero-dead-zone autonomous soft landing of subminiature unmanned rotor aircraft
A rotorcraft, ultra-small technology, applied in the direction of aircraft lander, etc., can solve the problems of target size, frequent changes in shape, errors, large frame errors before and after images, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
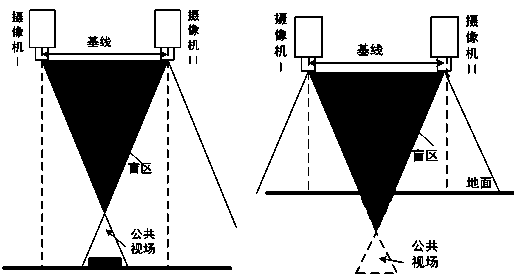
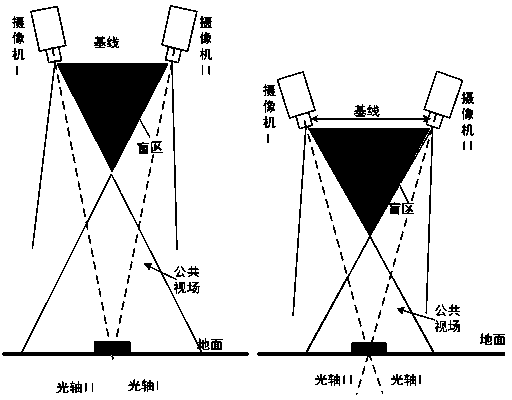
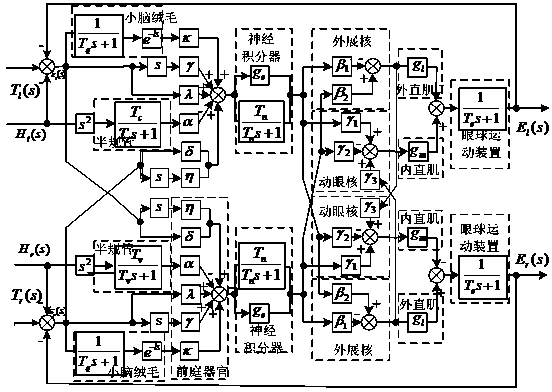
[0050] A preferred example of the present invention is described in detail as follows: see Figure 1~Figure 7 , this ultra-small unmanned rotorcraft fixed-point zero-blind zone autonomous soft landing method is characterized in that the vestibulo-oculomotor reflex of the binocular eyeballs and the anisotropic movement are fused together, which is the compound movement of the two, and based on this human-like The mathematical model of the eye's compound motion control system controls the binocular camera's onboard pan-tilt, so that the unmanned rotorcraft can still keep the landing target in the common field of view of the two cameras in harsh environments.
[0051] join Figure 6 , this bionic control method based on the compound motion of bionic heterotropic motion and vestibular-ocular reflex fusion is used for the field fixed-point landing system of ultra-small UAVs. The system includes ground control system 1 and airborne control unit and small unmanned aerial vehic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com