A autonomous robust decision-making method for unmanned aerial vehicles based on scenario construction
A decision-making method and unmanned aerial vehicle technology, applied in the direction of position/direction control, non-electric variable control, instruments, etc., can solve problems such as weak independent decision-making ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
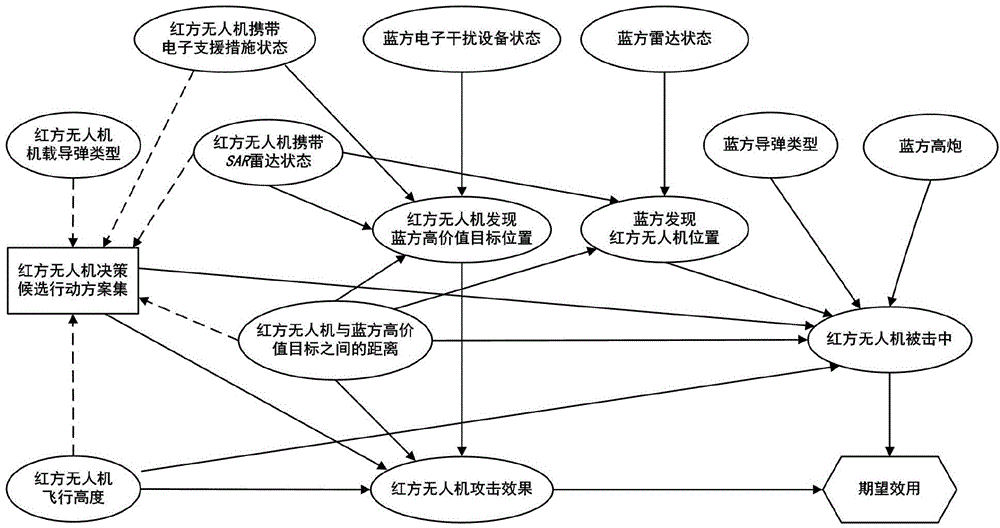
[0077] The present invention is an autonomous and robust decision-making method for unmanned aerial vehicles based on scenario construction, which is applied to the complex battlefield environment where the red unmanned aerial vehicle attacks the blue high-value target located in the blue position. The high-value target is the center, and the blue side's air defense position is equipped with radar, electronic jamming equipment, anti-aircraft guns and missiles. The blue side's high-value target can be an airport, an oil depot, an ammunition depot, a bridge, a communication center, or a command center. Ability goals such as figure 1 As shown, a scenario-based autonomous robust decision-making method for UAVs proceeds in the following steps:
[0078] Step 1: Define the decision variables of the red drone and the blue position in the battlefield
[0079] Let the red UAV carry electronic support measures state Red_ESMState={on, off}, the red UAV carry SAR radar state Red_SARState=...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com