A low-power consumption walking device and control method based on an intelligent terminal
A technology for intelligent terminals and walking devices, which is applied in position/direction control, vehicle position/route/altitude control, non-electric variable control and other directions. Loss, the effect of maintaining balance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with accompanying drawing:
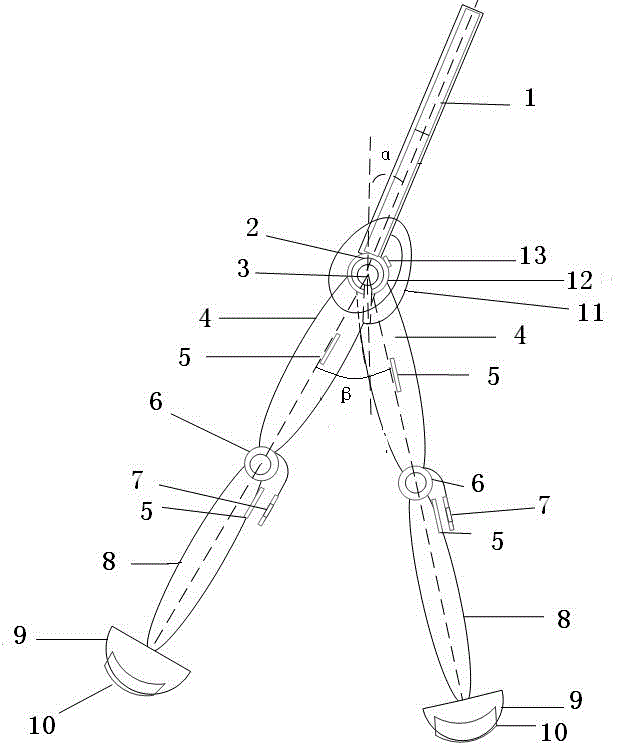
[0056] like Figure 1 to Figure 3 The shown low-power walking device based on an intelligent terminal has a pair of legs, each of which is connected to the hip joint 11 through a first rotating shaft, each of which includes a thigh 4 and a calf 8, and the The thigh 4 and the lower leg 8 are connected through the knee joint 6 , and the lower end of each lower leg 8 is connected with a foot 9 .
[0057] The driving device 2 is arranged at the hip joint 11 .
[0058] The braking device 7, which is arranged at the knee joints 6 of the two legs, can lock the thigh 4 and the lower leg 8 together.
[0059] An inclination sensor 13 is provided on the upper end of the hip joint 11 for detecting the initial value of the leg attitude angle and the ground inclination angle.
[0060] Encoders 5 are respectively arranged on the insides of the two thighs 4 and the two shanks 8, the enc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com