Road Edge Detection Method Based on Heuristic Probabilistic Hough Transform
A heuristic, probabilistic technology, applied in character and pattern recognition, image data processing, instrumentation, etc., to solve problems such as wrong road detection results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0055] A road-weighted Canny edge detection method. For each edge point subset, the least square method is used to fit the straight line first, and the axis of the point set is obtained. Suppose the equation of the straight line is L: y=kx+b, then the distance from any point (x, y) in the subset to the straight line is Foot coordinates ((ky+x-kb) / (1+k 2 ),(k 2 y+kx+b) / (1+k 2 )). Suppose two points P in the subset 1 ,P 2 Perpendicular point P on line L v1 ,P v2 are the two endpoints of all the vertical points on the axis, it can be easily proved that |P 1 P 2 |≥|P v1 P v2 |Established. So, P 1 ,P 2 to P v1 ,P v2 The mapping of is a compressed mapping, which means that the line segment P v1 P v2 For any foothold point on , at least one point corresponding to it can be found in the edge point subset. Select the point with the smallest distance in the subset of edge points as its corresponding point, and other points with the same vertical feet as non-correspond...
Embodiment 2
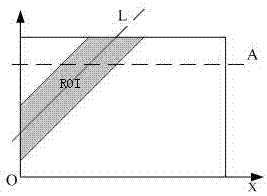
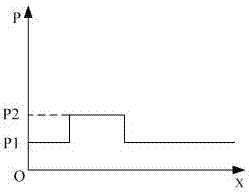
[0060] A heuristic probabilistic Hough transform method for weighted Canny edge images. According to the historical recognition results of the road boundary line L, the entire image space is divided into regions of interest and regions of non-interest. Edge points distributed in different regions have different probabilities value. as attached figure 1 , 2 As shown, the shaded area is the ROI area, and the edge points in this area have a higher probability value P2, so the probability of being randomly selected is higher, while the probability value of edge points in other areas is P1, and the probability of being selected lower. This means that the longer edge line segment in the ROI area will have a high chance to be selected first, rather than the longest line in the image space. Although the candidate edge points in the non-ROI area have a low probability of being selected, they do not deprive them of the opportunity of random mapping. When the road boundary suddenly oc...
Embodiment 3
[0069] A road weighted Canny edge bi-polyline model extraction method. The bi-polyline model divides the road boundary into two sections: the near section and the far section, which represent the direction and trend of the near road and the far road respectively. The extraction method of the model is as follows:
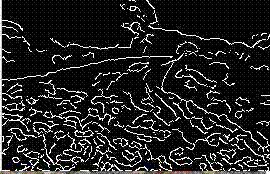
[0070] 1. Extract the weighted Canny edge from the original image, and filter according to the weight of the image edge to generate an edge family of candidate road boundaries.
[0071] 2. Use the least square method to estimate the main direction of the candidate edge family, and project all the edge points on the main axis generated by the least square method, and select the center position O of the edge family on the main axis according to the projection range.
[0072] 3. A straight line passing through point O and perpendicular to the main axis divides the edge family into two parts. First, Hough transform is performed on the nearby edge family, and then the ent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com