Mechanism for simulating jumping of frog rear legs
A technology of hind legs and lower legs, applied in the field of robot structure, can solve problems such as poor cushioning effect and affecting take-off efficiency, achieve obvious take-off effect, realize bionicity, and increase the degree of bionics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention is described in more detail below in conjunction with accompanying drawing example:
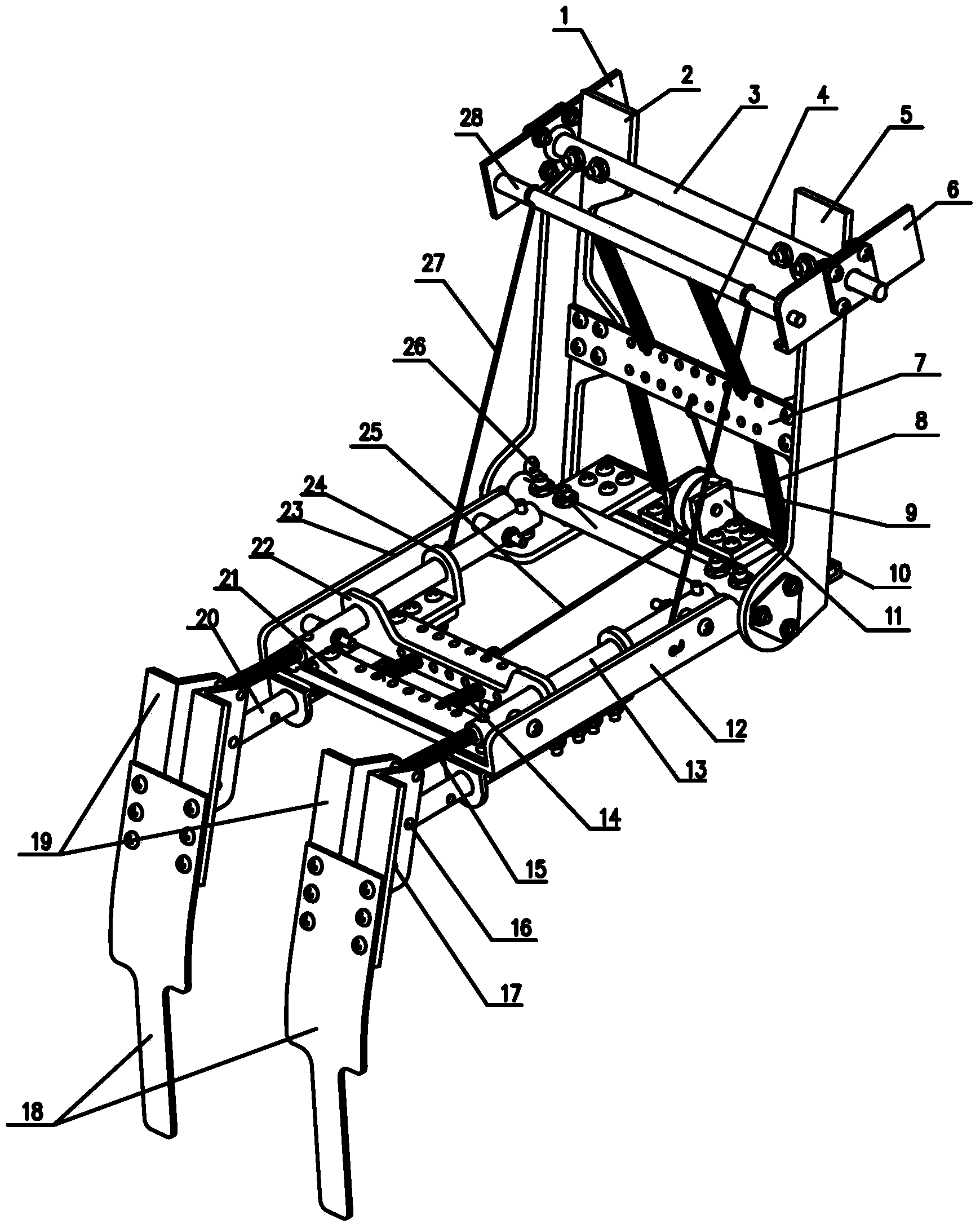
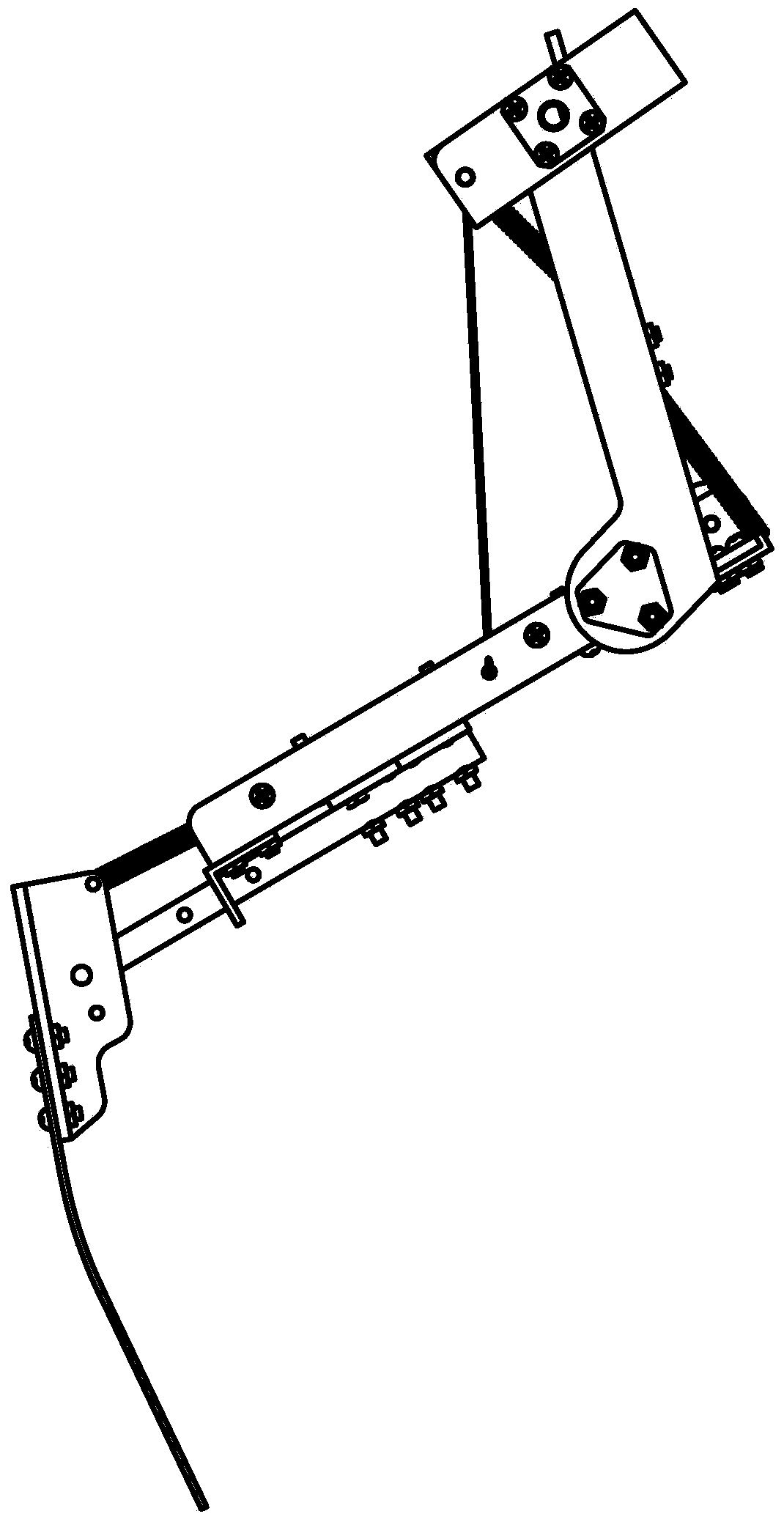
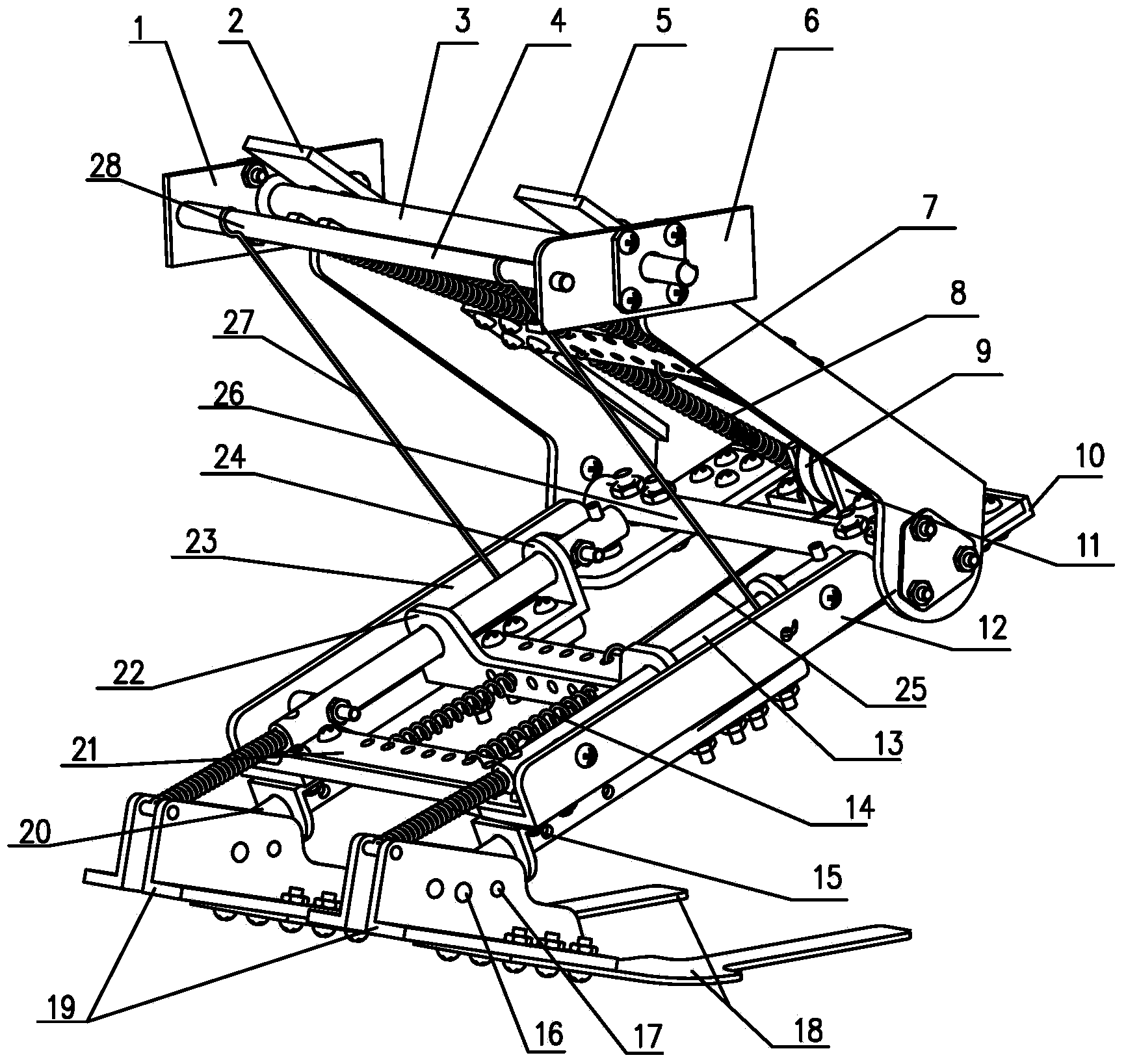
[0025] combine Figure 1~4 , The imitative frog hind leg jumping mechanism of the present invention comprises a trunk mechanism, a thigh mechanism, a shank mechanism and a sole mechanism.
[0026] The trunk mechanism includes a left side trunk support plate 1 and a right side trunk support plate 6, and the left and right side support plates are equipped with thigh joint shafts 3 and reinforcement support shafts 28.
[0027] The thigh mechanism includes a left thigh support plate 2 and a right thigh support plate 5, and the two support plates are fixed on the thigh joint shaft 3. It also includes a thigh fixing plate 7 and a thigh return spring 4, and the returning spring 4 is installed on the reinforcing support shaft 28 and the thigh fixing plate 7.
[0028] The calf mechanism mainly includes a calf rotation mechanism, a calf reset mechanism and a calf telescop...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com