Multi-target control method of automobile driving suspension system
A technology of active suspension and control method, applied in the field of control, can solve problems such as being unable to cope with the influence of control performance, unable to meet the multi-objective control performance of the suspension system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
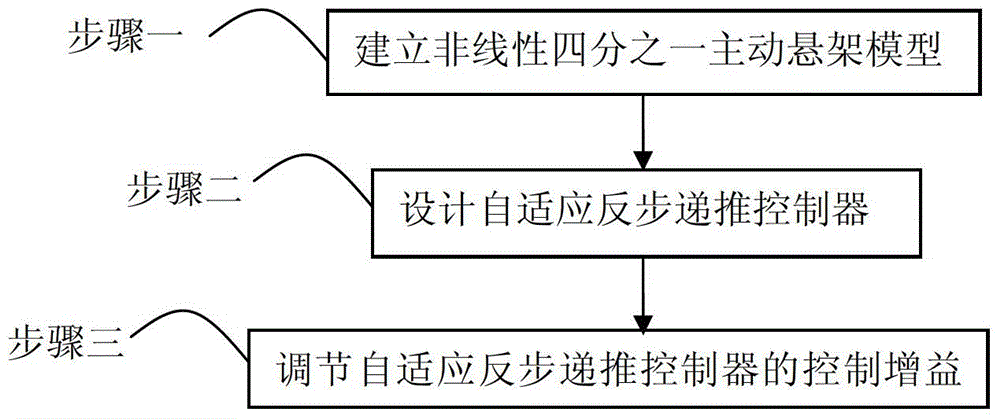
[0024] Specific implementation mode one: combine figure 2 Describe the present embodiment, the multi-objective control method of the automobile active suspension system of the present embodiment is realized according to the following steps:
[0025] Step 1, establishing a nonlinear uncertain quarter active suspension system model;
[0026] Step 2. Deriving an adaptive backstepping recursive controller;
[0027] Step 3, adjusting the control gain parameters of the adaptive backstepping recursive controller.
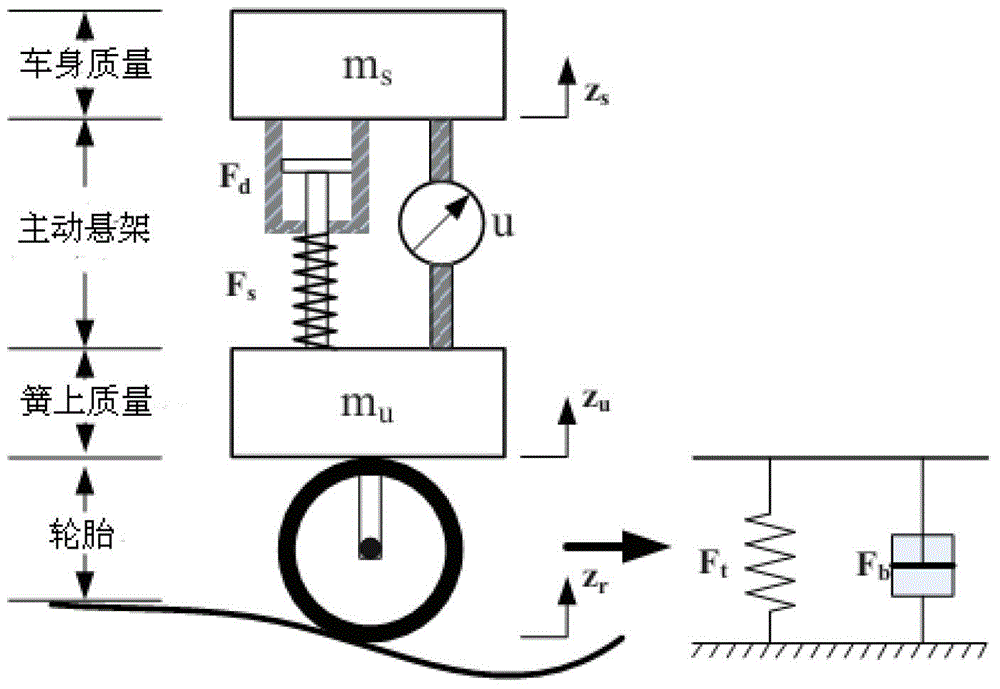
[0028] figure 2 The specific parameters of the active suspension system are as follows: Body mass: m s =600kg; Maximum weight of vehicle body: m smax =700kg; minimum body weight: m smin =550kg; wheel assembly mass: m u =60kg; linear stiffness coefficient of spring assembly: k s =18000N / m; the nonlinear stiffness coefficient of the spring assembly: Elongation damping coefficient of spring assembly damper: b e =2500Ns / m; compression damping coefficient of spring ...
specific Embodiment approach 2
[0038] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is: the establishment of a nonlinear uncertain quarter active suspension system model described in step one is specifically:
[0039] According to Newton's second law, the dynamic equation of a quarter active suspension system can be expressed as:
[0040] m s z · · s + F d ( z · s , z · u , t ) + F s ( z s , z ...
specific Embodiment approach 3
[0066] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that the design of the self-adaptive backstepping recursive controller described in step two includes the following five parts:
[0067] (1) Design the virtual control function α so that the tracking error e 1 =x 1 -x 1r as small as possible, where x 1r is the reference track signal. Combining formulas (7) and (8), we can get
[0068] e · 1 = x 2 - x · 1 r - - - ( 13 )
[0069] choose x 2 As the virtual control input of error dynamics (13), its ideal function is α, define e 2 as actual state x 2 Same as dummy input x 2 The error between, that is, e 2 =x 2 -α, then f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com