Robot running mechanism with dual purpose of overwater and underwater operations
A technology for working robots and walking mechanisms, applied in the field of intelligent robots, can solve the problems of difficulty in maintaining attitude stability, limiting the scope of application, and complex control mechanisms, and achieves the effects of simple structure, convenient control, and flexible control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
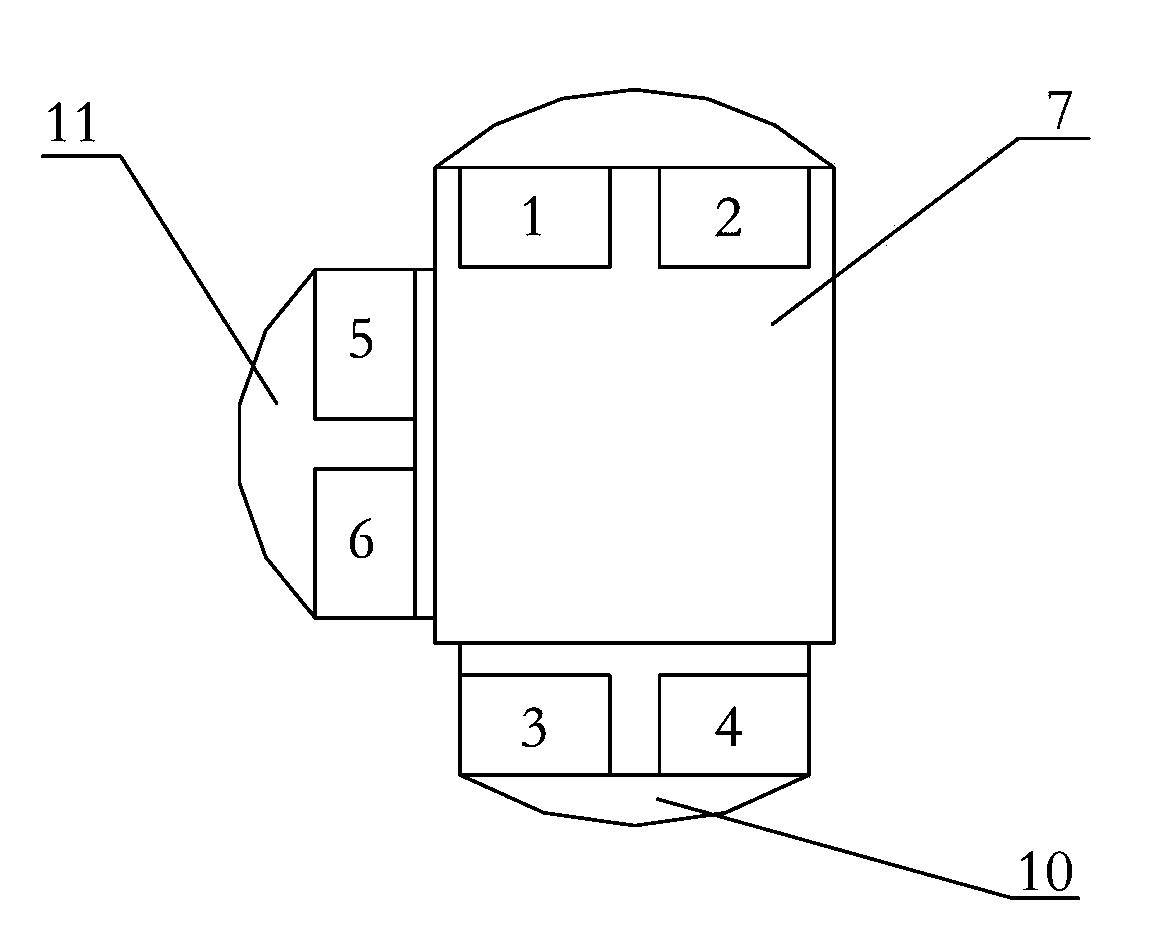
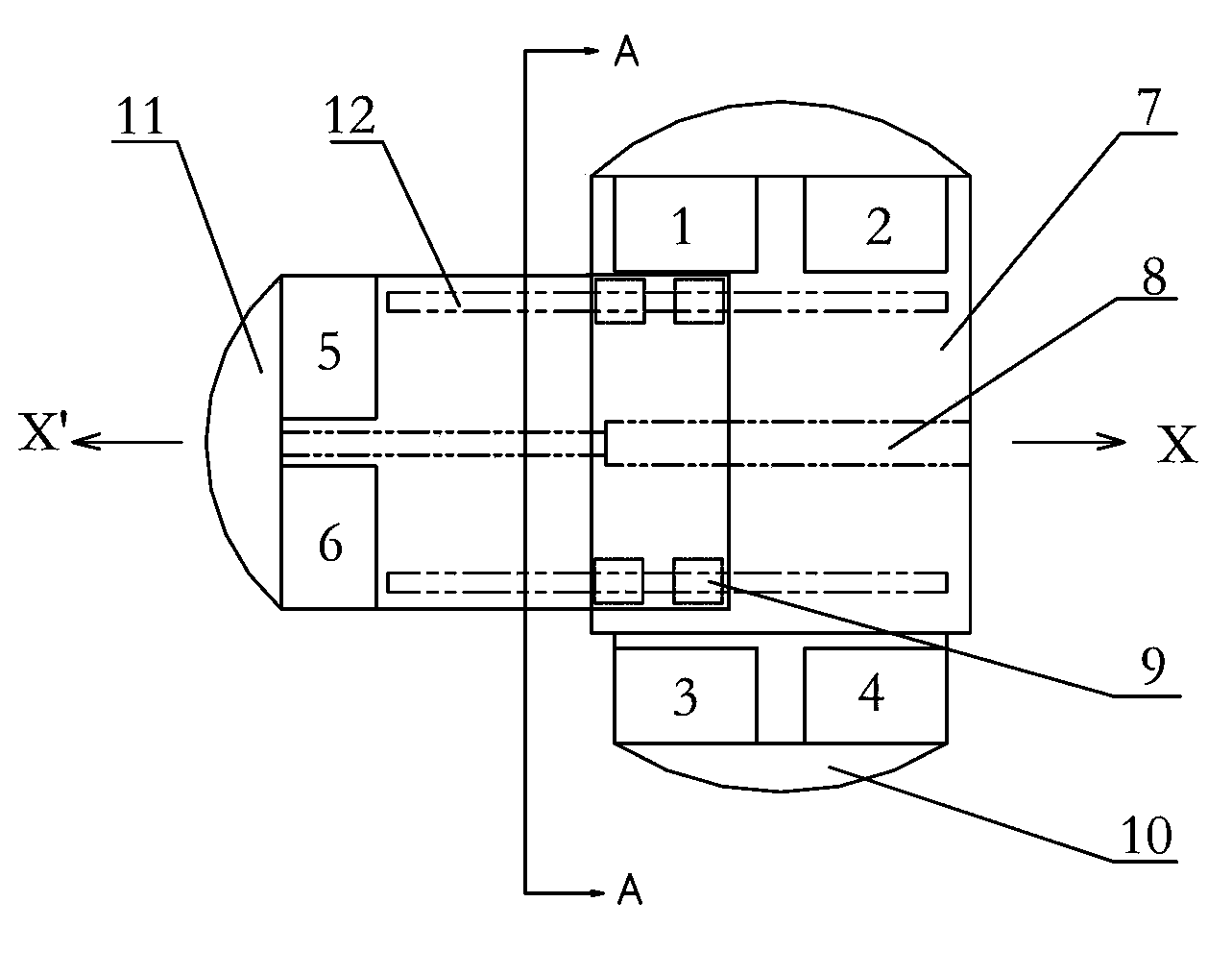
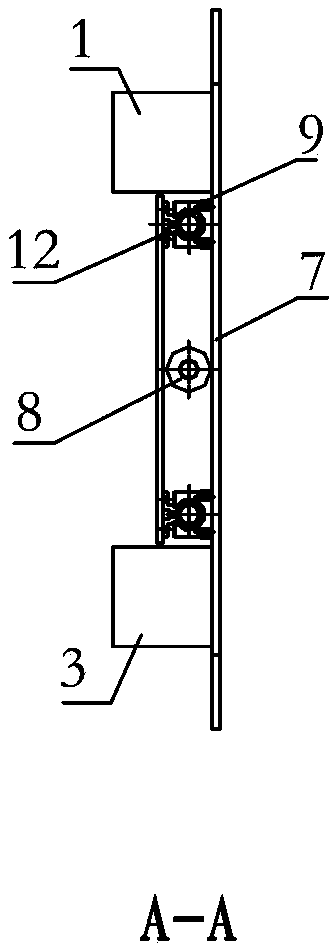
[0013] Such as figure 1 As shown, an embodiment of the walking mechanism of the underwater and underwater dual-purpose working robot is provided with an X-direction frame 11 and a Y-direction frame 10 in the main frame 7, and the X-direction frame 11 and the Y-direction frame 10 are arranged on the main frame 7. The seat 7 is stacked in a direction perpendicular to each other at 90°, and constitutes a moving structure in the positive and negative directions of X and Y through each sucker and moving cylinder respectively.
[0014] For different places of use, the suction cup of the present invention can adopt various types, such as being used on the ground or a building wall, a negative pressure suction cup controlled by compressed air can be used, such as being used on the surface of a metal body such as a ship hull, it can be used Using electromagnetic chuck. On this basis, it is equipped with moving wheels, which can realize fast walking on land or work on the surface of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com