Autonomous hovering control system and method for quadrotor unmanned aerial vehicle based on dsp
An unmanned aerial vehicle and control system technology, which is applied in the field of autonomous hovering control of unmanned aerial vehicles, can solve problems such as small load, and achieve the effects of low cost, guaranteed consistency and low price.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The DSP-based four-rotor unmanned aerial vehicle autonomous hovering control system and method of the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings.
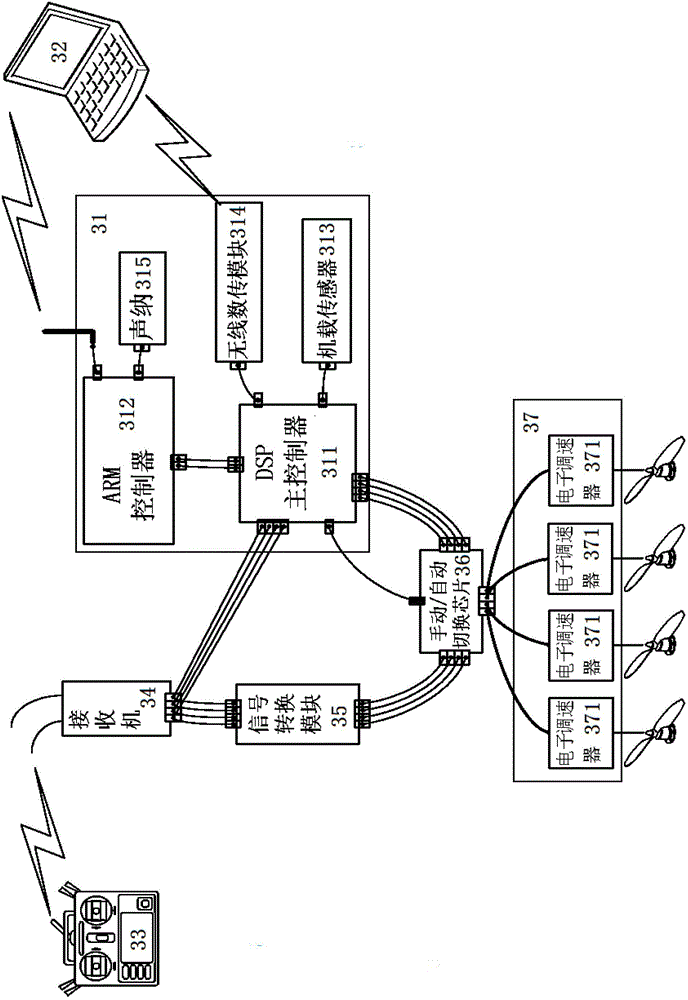
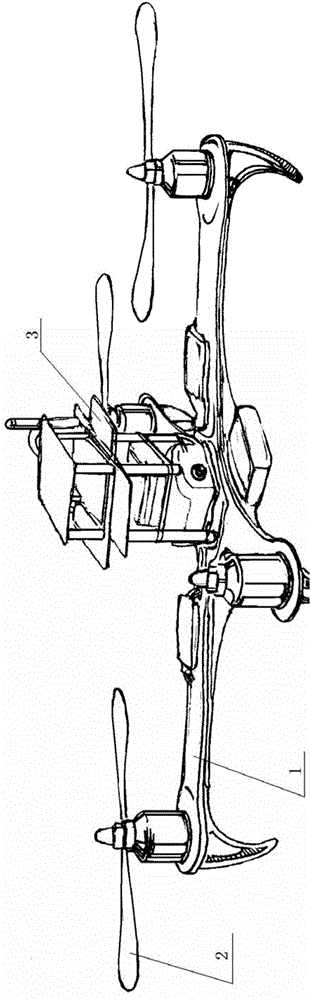
[0052] like figure 1 , figure 2 As shown, the DSP-based four-rotor unmanned aerial vehicle autonomous hover control system of the present invention includes a four-rotor body 1, four propellers 2 respectively arranged on four wings and a control unit for controlling the rotation of four propellers 2 3.
[0053] 1. The four-rotor body 1 is a four-rotor unmanned aerial vehicle that comprehensively considers the structural stability, load capacity, endurance, controllability and other characteristics of the aircraft body. The diameter of the fuselage is 450mm, the height is 111mm; the empty weight is 750g (excluding receiver and battery), the load weight is 750g, and the maximum safe take-off total weight is 1500g; the diameter of the propeller is 25.5cm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com