Master-slave mode multi-UUV (Unmanned Underwater Vehicle) cooperative location method based on underwater acoustic communication delay
A technology for underwater acoustic communication and co-location, which can be used in positioning, underwater ships, ships, etc., and can solve problems such as large positioning errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
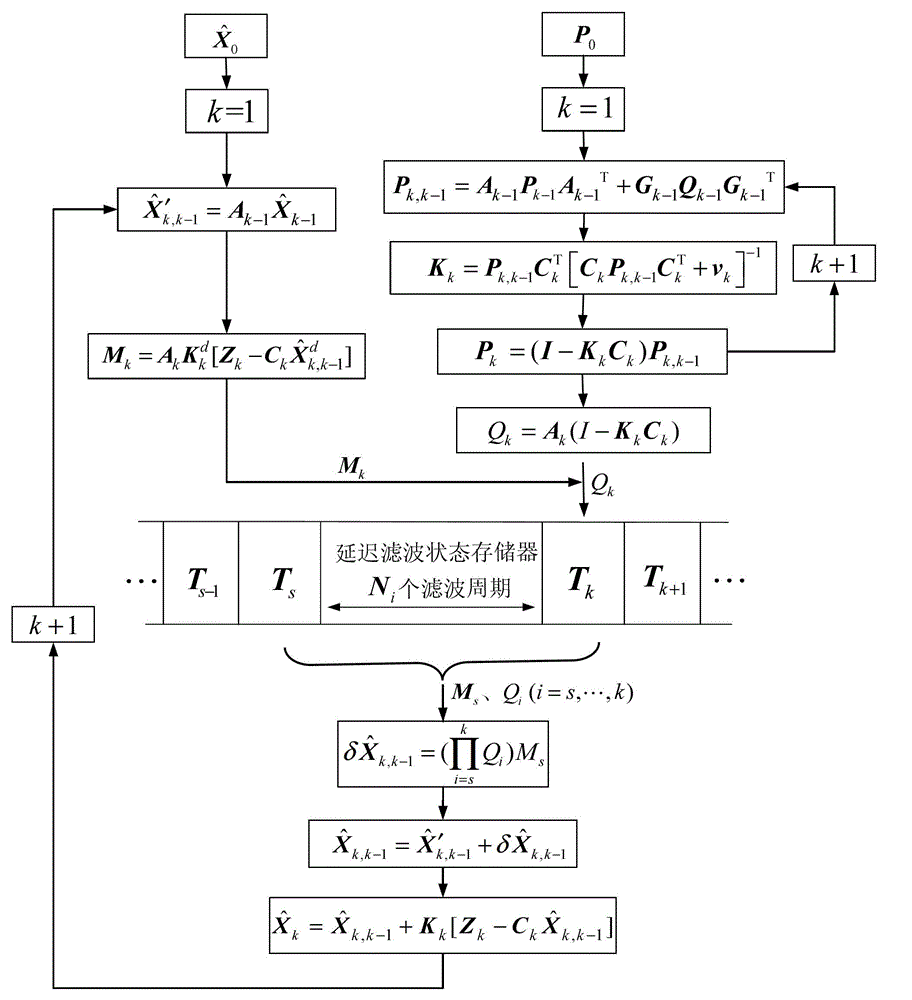
[0068] Specific implementation mode 1. Combination figure 1 Illustrate this specific embodiment, a kind of master-slave multi-UUV cooperative positioning method based on underwater acoustic communication delay, its feature comprises the following steps:
[0069] Step 1. The master and slave UUVs prepare for clock synchronization, and the master UUV measures the distance between the master and slave UUVs through underwater acoustic ranging;
[0070] Step 2, the master UUV sends its own positioning information, distance information and timestamp of information sending time to the slave UUV through the underwater acoustic equipment;
[0071] Step 3: After receiving the main UUV underwater acoustic information from the UUV, use the computer clock to calculate the delay time of this underwater acoustic communication, collect its own aerial reckoning positioning information, and establish the state equation of the cooperative positioning system;
[0072] Step 4. Calculate the syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com