Wear type lower limb assistant robot, folding method thereof and hand luggage for carrying
A wearable, robotic technology, applied in appliances, applications, luggage and other directions that help people to move around, can solve the problems of time-consuming, high manufacturing cost, and limit the range of motion of lower limb joints, and achieve simple and reasonable structural settings, stable and reliable. Walking speed, the effect of preventing human bone damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The structure of the wearable lower limb assisting robot in this embodiment is set as follows:
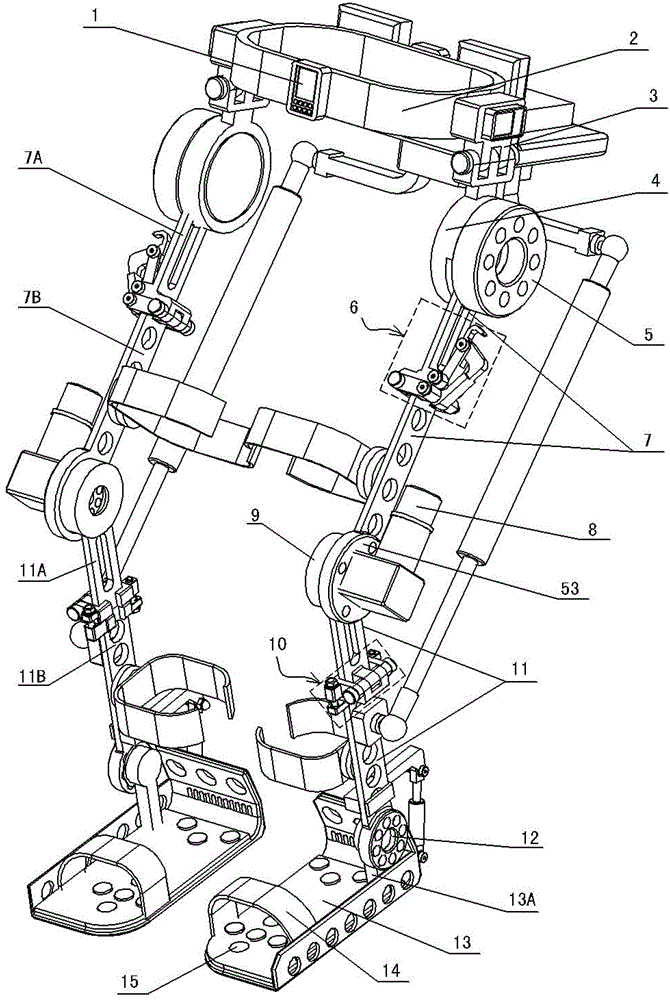
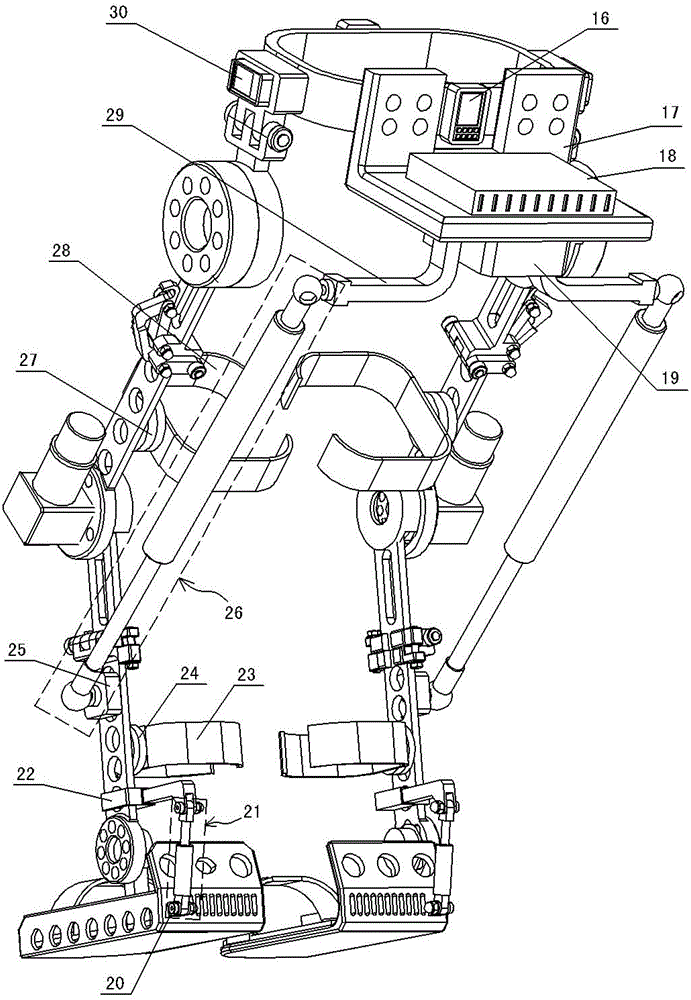
[0061] see figure 1 , figure 2 and Figure 6 , the lower limb power-assisted mechanical device is to symmetrically arrange wearable power-assisted mechanical legs 48 on both sides of the wearable belt 2; 17; power-assisted mechanical legs 48 are tied to the legs and feet of the human body through the thigh bandage 28, the calf bandage 23 and the foot bandage 14 respectively, the belt 2 is tied to the waist of the human body, and the support 17 is used to carry and install the microcontroller 18 and the lithium battery Group 19, bracket 55 and box body 54;
[0062] The servo control system includes a microcontroller 18 fixedly arranged on the support 17, a lithium battery pack 19 fixed on the bottom of the support 17, a fall prediction alarm circuit 1 fixed on the front side of the belt 2, The rear fall prediction and alarm circuit 16 on the rear side, and the hand-contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com