Video target tracking method under circumstance of scale change and shielding
A technology of scale change and target tracking, applied in the field of image processing, which can solve the problems of unsatisfactory tracking effect of LBP tracking algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
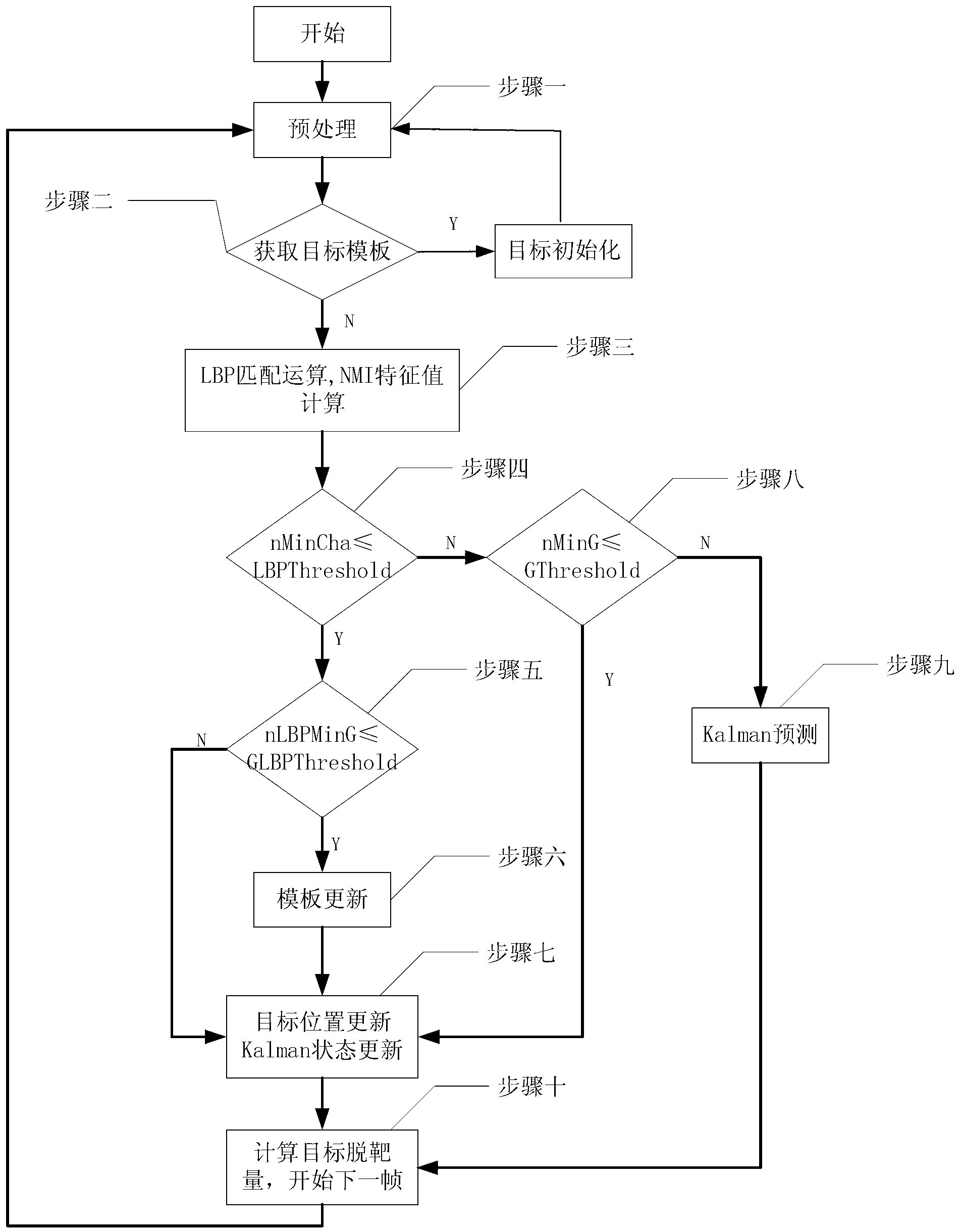
[0030] Specific implementation mode one: the following combination figure 1 Describe this embodiment, a video object tracking method under the condition of scale change and occlusion in this embodiment is to use the size invariance of the image normalized moment of inertia and the prediction function of Kalman filter to perform the target size change and the target Tracking during occlusion, the method includes the following steps:
[0031] Step 1, preprocessing the current frame image of the video, such as smoothing filtering, etc.; setting the size of the target template, the size of the search area, and the initial state of Kalman filtering;
[0032] Step 2, judging whether the target template needs to be reselected in the current frame image;
[0033] If it is not necessary to reselect the target template, perform step 3; if it is necessary to reselect the target template, select a new target template and reinitialize the target template to obtain the LBP operator of the ...
specific Embodiment approach 2
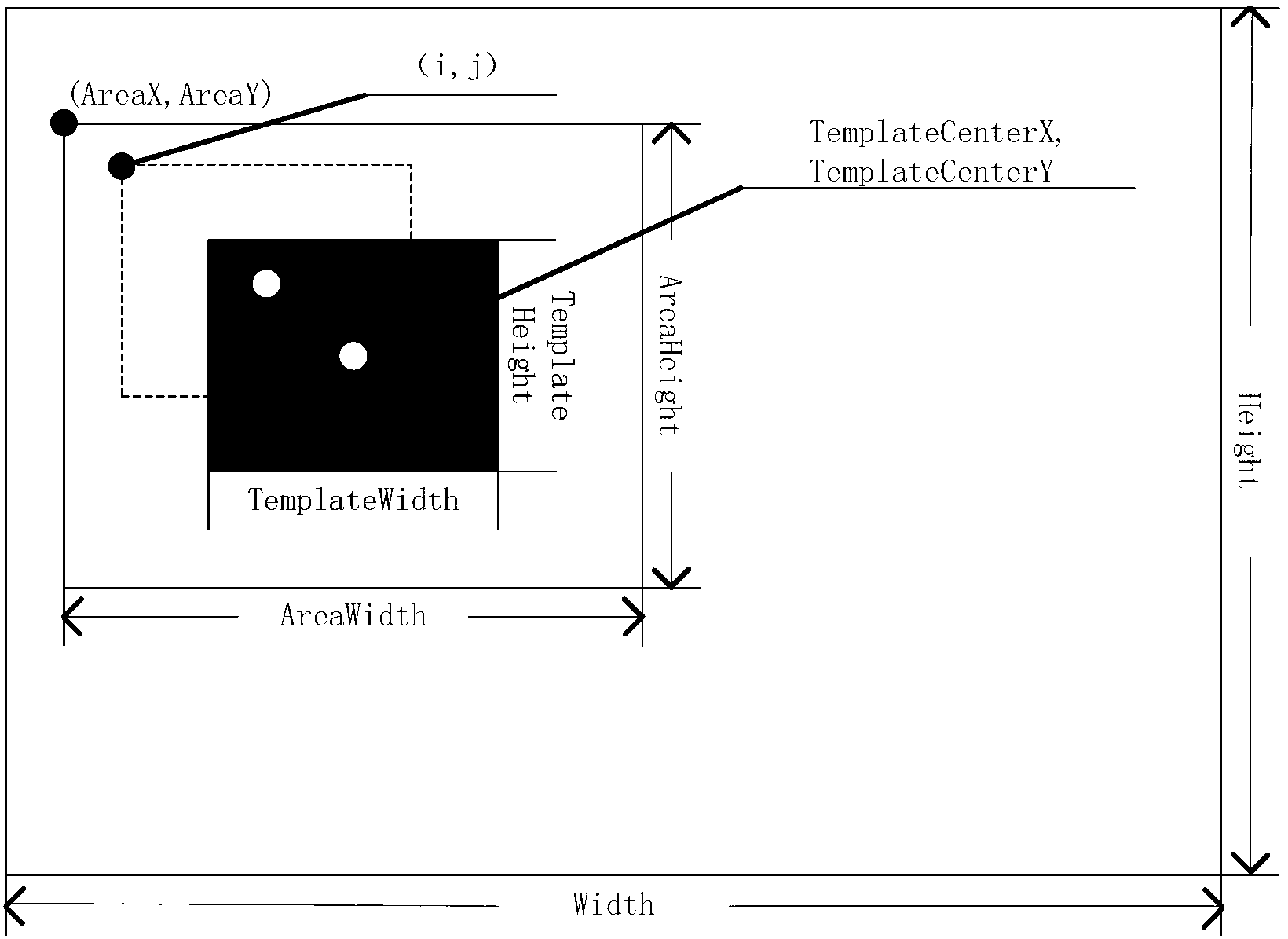
[0054] Specific implementation mode two: the following combination figure 2 Describe this embodiment, this embodiment will further explain Embodiment 1. In step 3, the center position of the target template in the previous frame image is used as the center to establish the search area of the current frame image, traverse the search area in the search area, and find the search area The process of the LBP module and the NMI module is:
[0055] Establish the search area of the current frame image centered on the center position of the target template in the previous frame image,
[0056] The coordinates of the center position of the target template in the previous frame image are (TemplateCenterX, TemplateCenterY), the length of the target template is TemplateHeight, and the width is TemplateWidth.
[0057] Then establish the center position coordinates of the search area of the current frame image as (TemplateCenterX, TemplateCenterY), the length is 2×TemplateHeight, and...
specific Embodiment approach 3
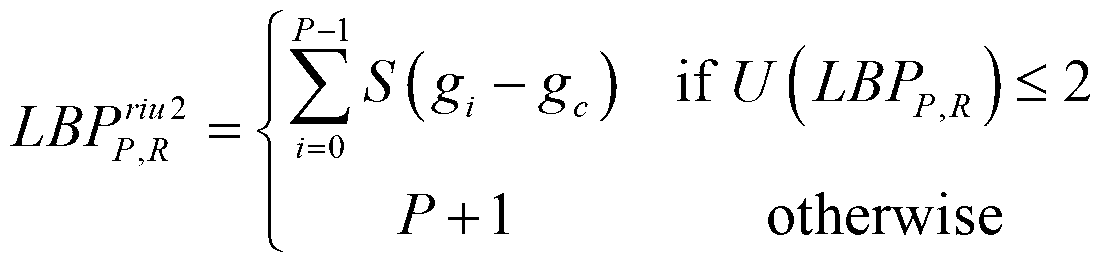
[0062] Specific implementation mode three: this implementation mode further explains implementation mode one, the LBP operator of the LBP module in step three by formula
[0063] LBP P , R riu 2 = Σ i = 0 P - 1 S ( g i - g c ) ifU ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com