Binocular stereovision measuring device and method for attitude angle of triaxial air floating platform
A binocular stereo vision and stereo measurement technology, applied in the field of measurement, can solve the problems of accuracy limitation and no angle calculation method, and achieve the effects of high precision, fast speed and simple calculation process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
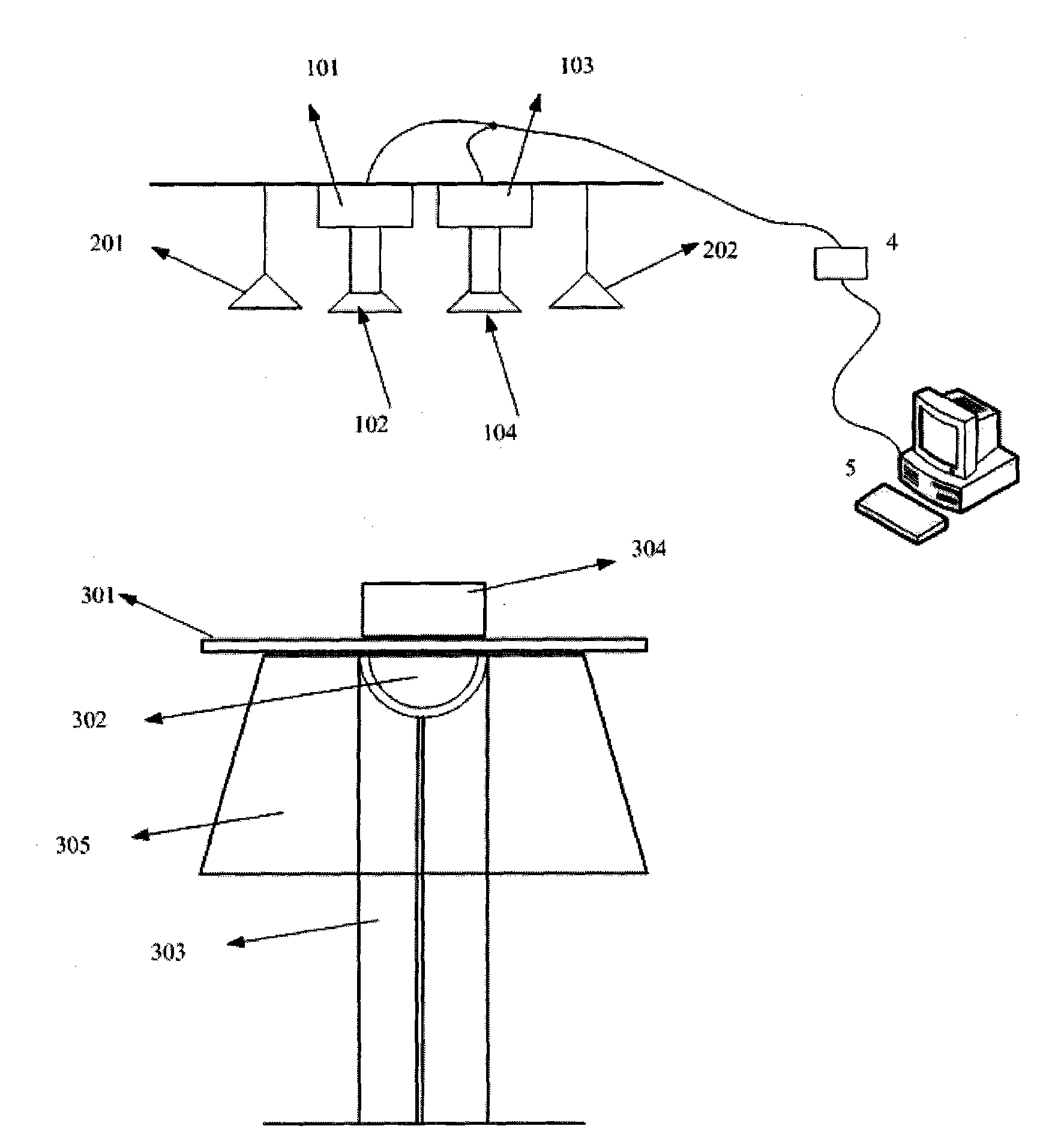
[0035] see figure 1 , the present invention mainly consists of the following parts:
[0036] The first digital CCD camera 101, the second digital CCD camera 102, the first lens 103, the second lens 104, the first camera base 105, the second camera base 106, the first artificial light source 201, the second artificial light source 202, Air bearing table top 301 , spherical air bearing 302 , bearing base 303 , measurement target 304 , instrument platform 305 , converter 4 , and computer 5 .
[0037] Both the first and second CCD cameras 101.102 are black-and-white digital CCD cameras, which are connected to the computer 5 through a converter 4 for anti-interference.
[0038] First and second cameras 101.102 are mounted on first and second bases 105.106, respectively.
[0039] The first and second lenses 103.104 are object-space telecentric lenses.
[0040] The first and second artificial light sources 201.202 provide constant, reliable illumination for image acquisition.
[...
Embodiment 2
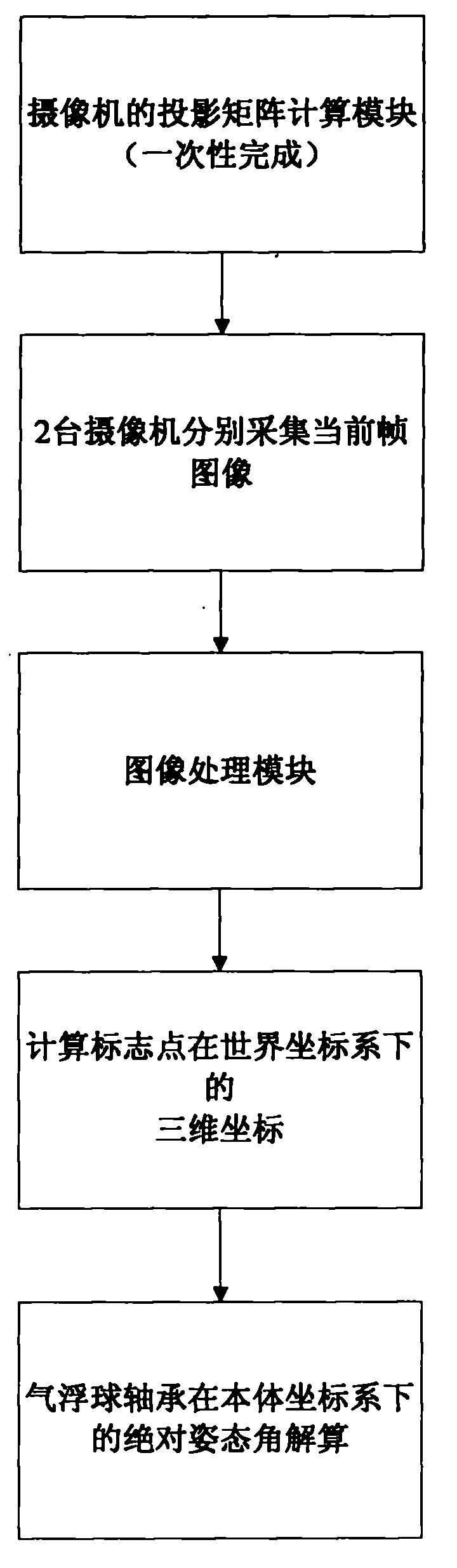
[0046] The invention uses binocular cameras to collect images of measurement targets, and uses the principle of stereo vision measurement to calculate the attitude angle of the three-axis air-floating ball bearing in the body coordinate system. The schematic diagram of the main flow chart is as image 3 As shown, it mainly includes the following main steps:
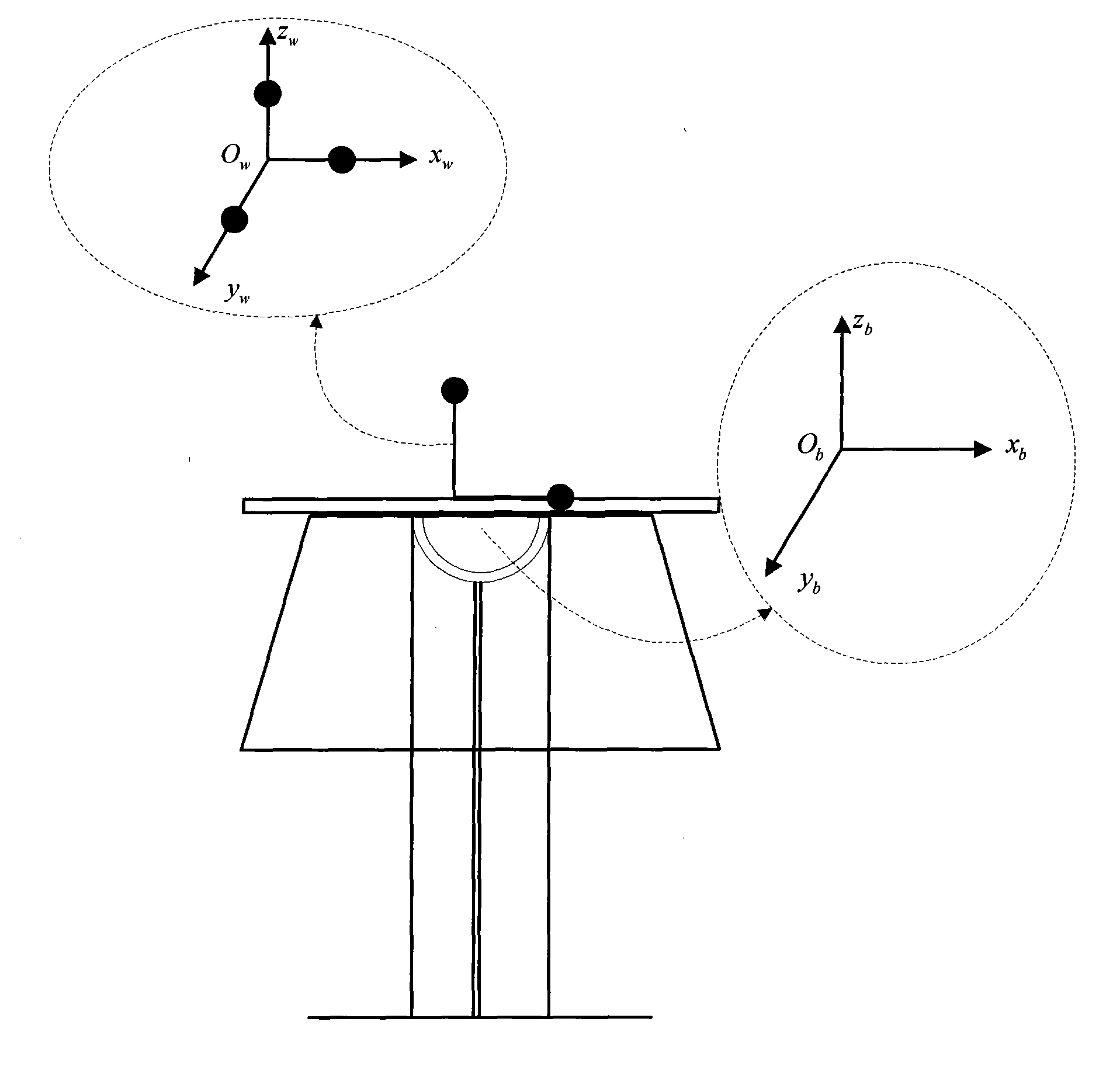
[0047] 1. The measurement target is installed on the air bearing platform, and the world coordinate system in the measurement system of the present invention is established. In this coordinate system, all mark points on the three-dimensional target have unique three-dimensional coordinates;
[0048] 2. Each of the two cameras collects an image of a stereo measurement target and transmits it to the computer;
[0049] 3. Perform feature extraction on the two images, and use sub-pixel positioning technology to determine the coordinates of all marker points in the two images in the image pixel coordinate system; related algo...
Embodiment 3
[0065] 1. Projection matrix calculation principle:
[0066] The calculation method of the projection matrix H between the image pixel coordinate system and the world coordinate system of the camera involved in the present invention is as follows:
[0067] The imaging model between the i-th marker point and its image point on the measurement target is:
[0068] z ci u i v i 1 = H x w , i y w , ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com