Splittable snake-like robot with multiple motion modes
A multi-motion mode, robot technology, applied in manipulators, motor vehicles, transportation and packaging, etc., can solve the problems of snake-shaped robot movement ability limitation, affecting search and rescue and detection ability, limiting snake body movement speed, etc., to achieve a simple shell design , to achieve the effect of diversification and reducing unnecessary wear and tear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in further detail below in conjunction with the accompanying drawings.
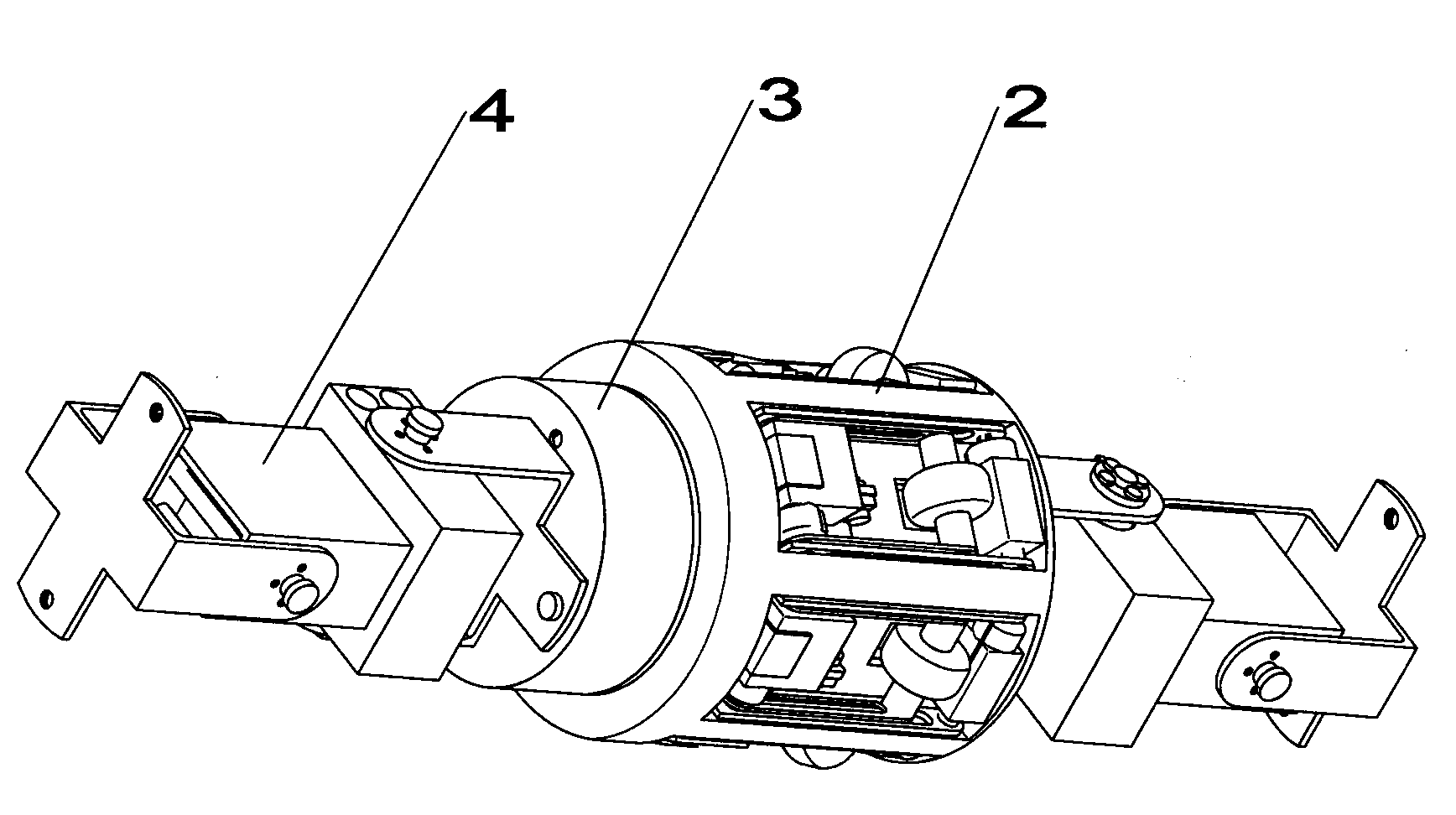
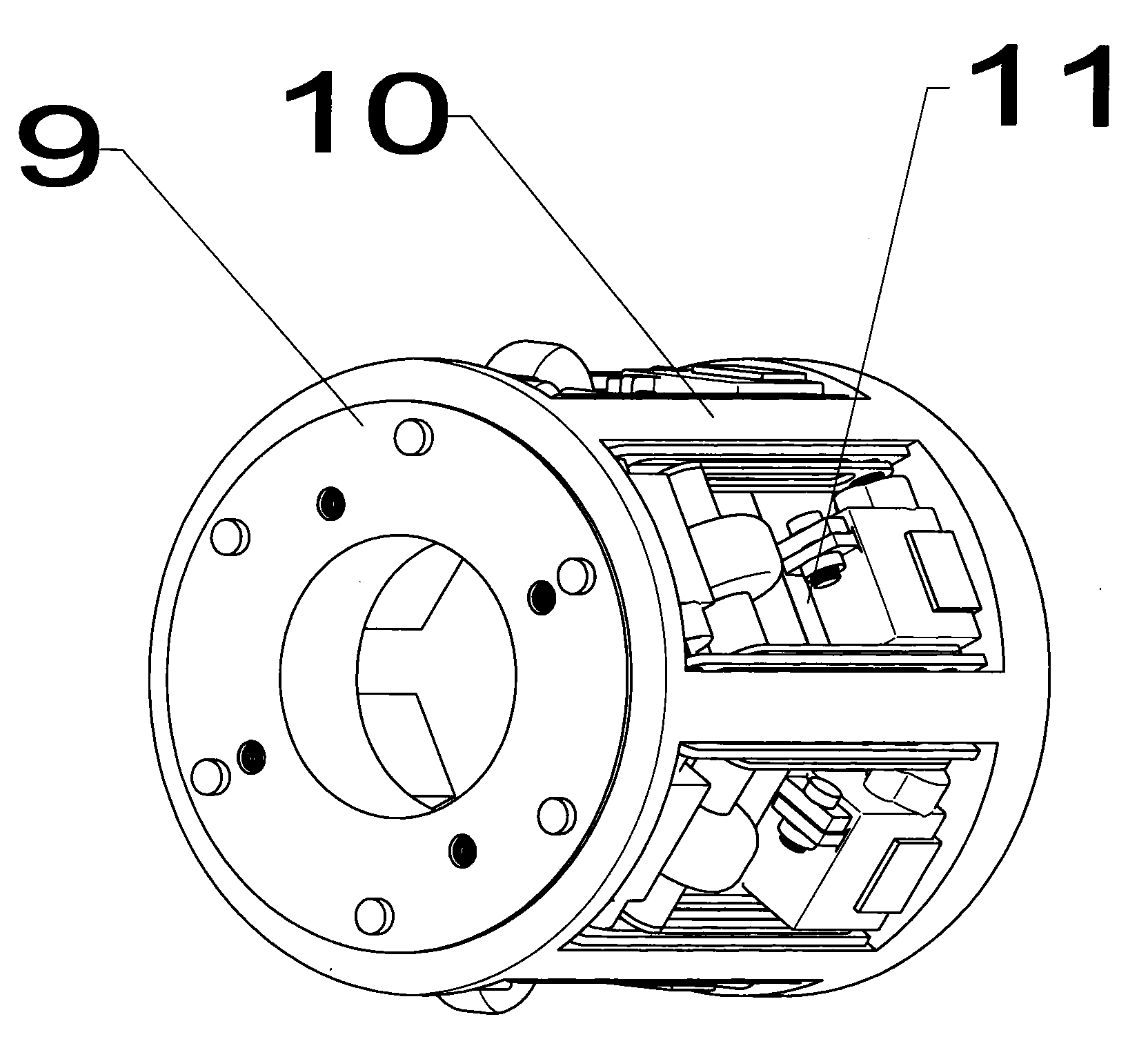
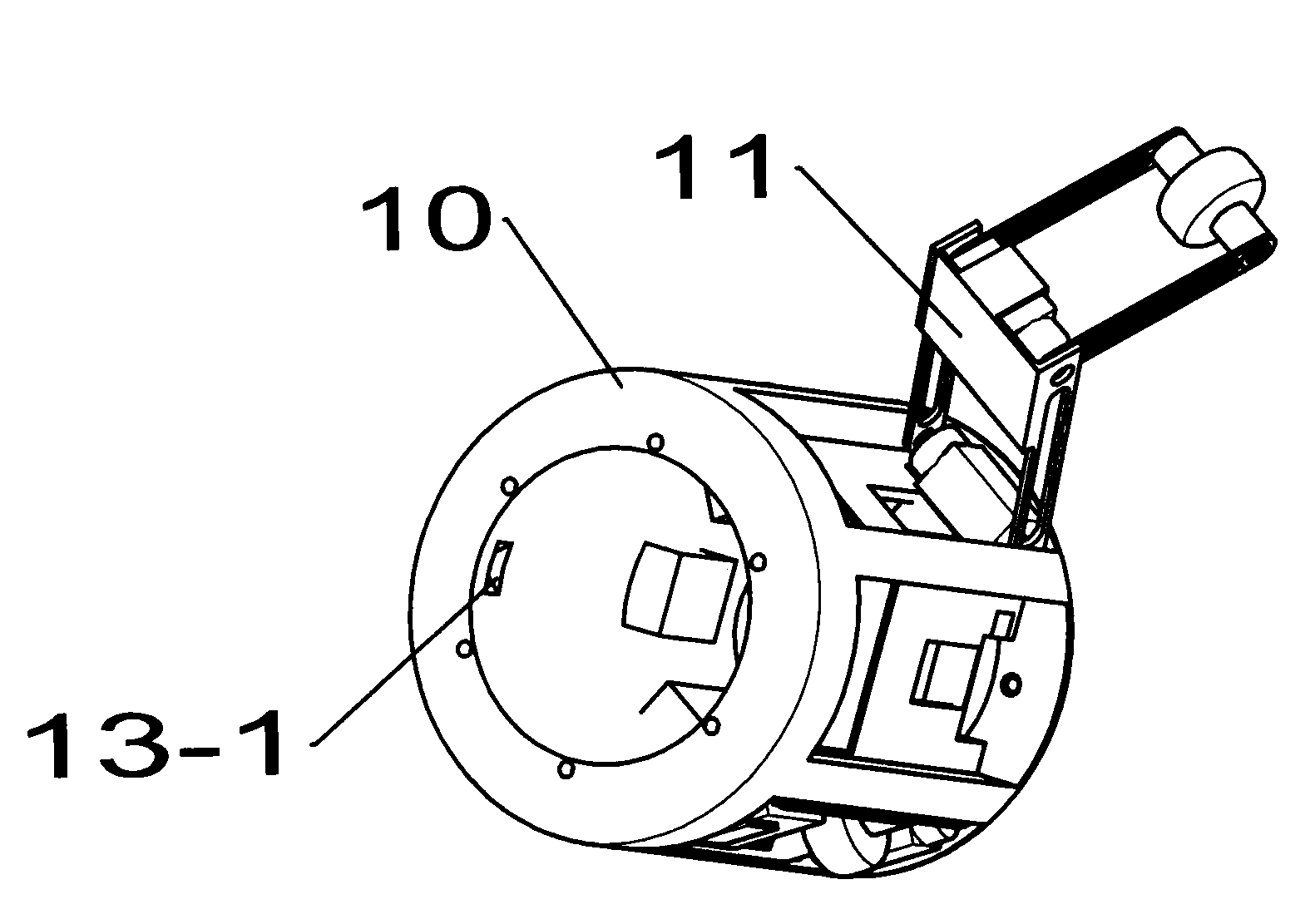
[0031] Such as figure 1 As shown, the present invention is composed of a head 1, a torso 2, a split body 3, a joint 4 and a tail 5, wherein the head 1 is mainly used to install sensing devices responsible for environmental information collection, such as cameras, lights, etc. The trunk part 2 is mainly equipped with an independent telescopic wheel-leg composite mechanism 11 and corresponding controllers, batteries, etc., to realize the basic winding, wriggling, sliding, crawling and power supply control of the snake body; the split part 3 relies on the three-leaf arc guide wheel 14 Rotational motion is converted into linear motion to realize the screwing in and out between the telescopic rod 13 and the split connection hole 13-1 to realize the split; the joint part 4 relies on the torsion steering gear 25 and the U The shape rotating connecting plate transmi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com