Pneumatic muscle driven frog-imitation bouncing leg having perceptivity
A technology of pneumatic muscle and perception ability, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of complicated and bulky mechanism, limited jumping ability, lack of sensing system, etc., and achieve the effect of avoiding gear mechanism, efficient jumping, and simplified mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
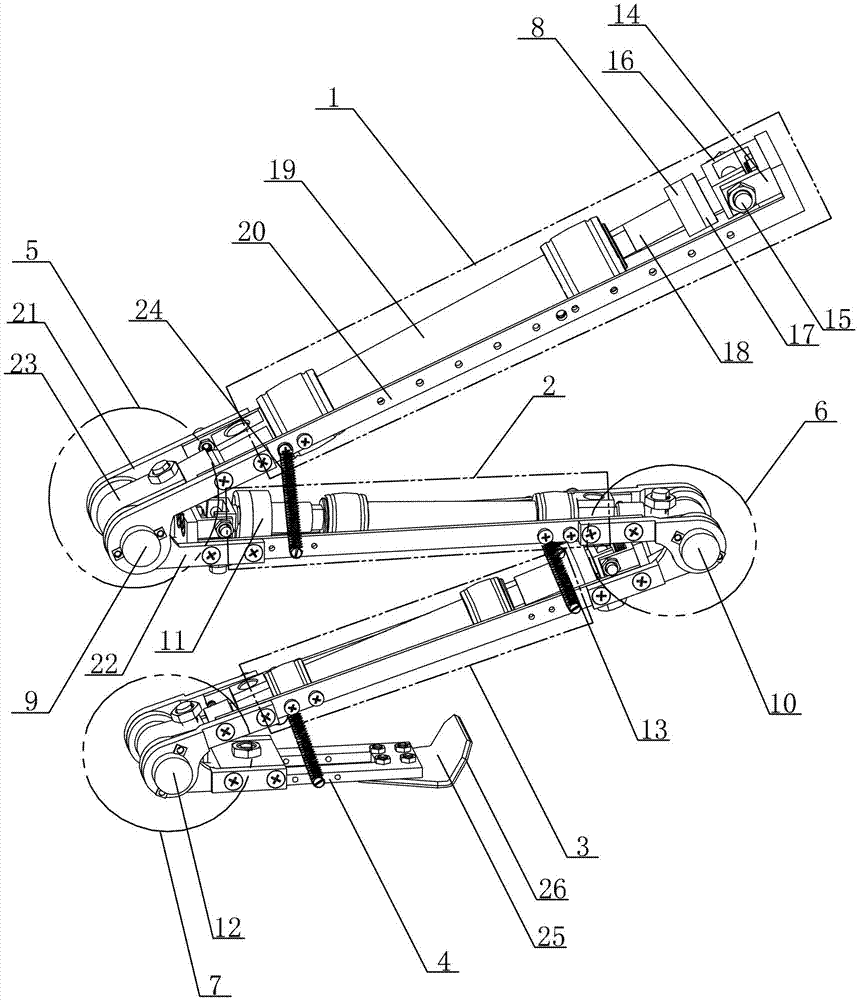
[0010] Specific implementation mode one: combine figure 1 Describe this embodiment. A pneumatic muscle-driven imitation frog jumping leg of this embodiment includes a trunk body 1, a thigh body 2, a calf body 3, a foot 4, a hip joint 5, a knee joint 6, and an ankle joint 7 , hip joint force sensor 8, hip joint angle sensor 9, knee joint angle sensor 10, knee joint force sensor 11, ankle joint angle sensor 12 and ankle joint force sensor 13, trunk body 1, thigh body 2, calf body 3 and foot The parts 4 are rotatably connected through the hip joint 5, the knee joint 6 and the ankle joint 7 in turn. The hip joint force sensor 8 is set on the trunk body 1, the hip joint angle sensor 9 is set on the hip joint 5, and the knee joint angle sensor 10 Set on the knee joint 6, the knee joint force sensor 11 is set on the thigh body 2, the ankle joint angle sensor 12 is set on the ankle joint 7, the ankle joint force sensor 13 is set on the calf body 3, the trunk body 1, thigh The main bo...
specific Embodiment approach 2
[0011] Specific implementation mode two: combination figure 1 Describe this embodiment, the torso body 1 of this embodiment includes a muscle fixing part 14, a muscle fixing end shaft 15, a muscle fixing end connecting part 16, a force sensor connecting part 17, a muscle connecting part 18, a pneumatic muscle body 19 and a support frame 20 , the muscle fixing part 14 is arranged on the head end of the support frame 20, the muscle fixing end connecting part 16 is rotatably connected with the muscle fixing part 14 through the muscle fixing end rotating shaft 15, the force sensor connecting part 17 is connected with the muscle fixing part 14, and the force sensor is connected A hip joint force sensor 8 , a knee joint force sensor 11 or an ankle joint force sensor 13 is arranged between the component 17 and the muscle connector 18 , and the pneumatic muscle body 19 is connected to the muscle connector 18 . In this way, when jumping, the pneumatic muscle body 19 contracts due to in...
specific Embodiment approach 3
[0012] Specific implementation mode three: combination figure 1 Describe this embodiment, the pneumatic muscle body 19 of this embodiment is a stretchable pneumatic muscle body. Set up like this, it provides strong power for jumping. Other compositions and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com