Position/force hybrid control method for space manipulator
A space manipulator, hybrid control technology, applied in manipulators, program control manipulators, manufacturing tools, etc., can solve the problems of oscillation stability in the transition process, difficulty in application, and no compensation of dynamic characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
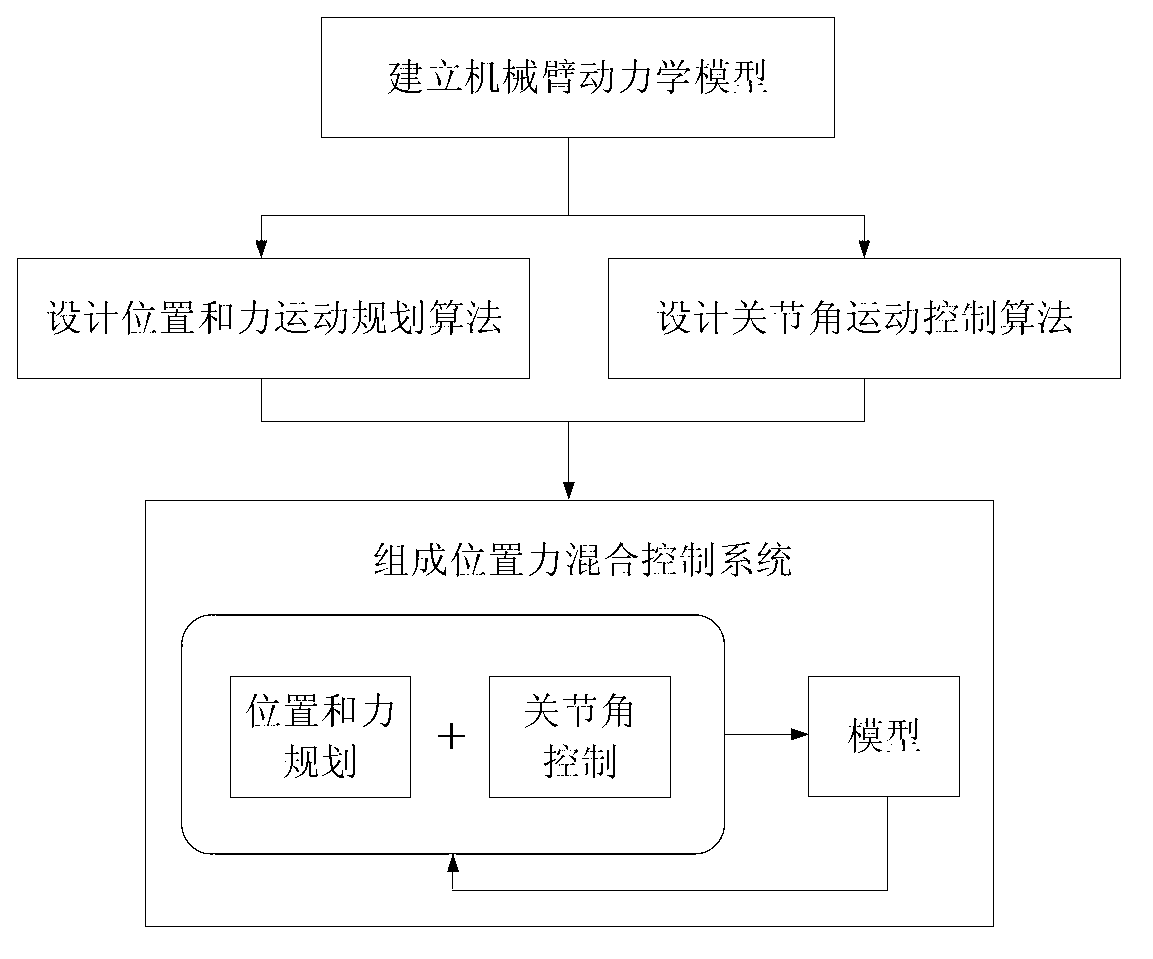
[0044] The implementation process of the whole invention is shown in figure 1 . The specific implementation is described in detail as follows:
[0045] (1) Establish the dynamic model of the manipulator
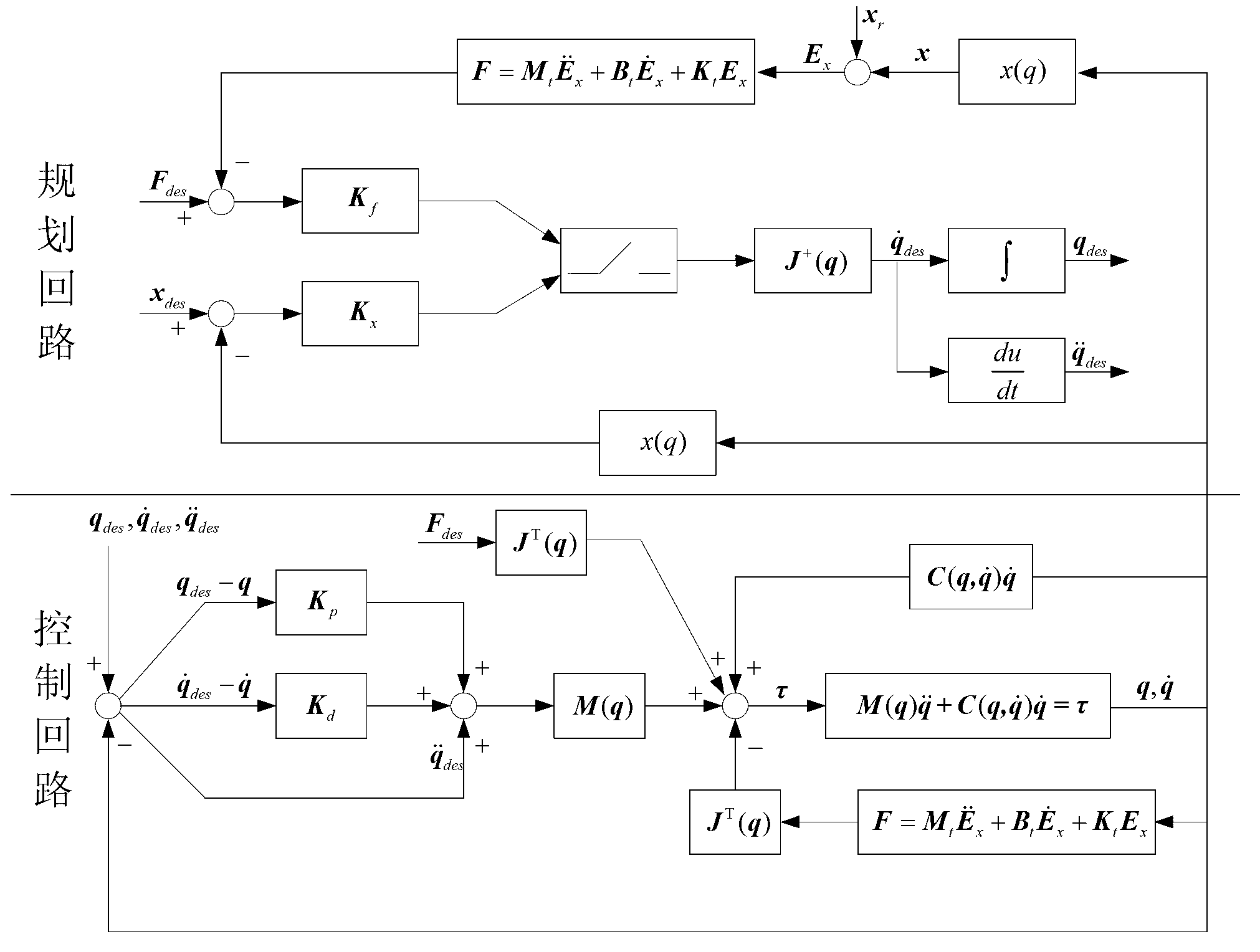
[0046] Consider an n-degree-of-freedom redundant space manipulator whose multi-rigid body dynamics equation is described as
[0047] M ( q ) q · · + C ( q , q · ) q · = τ - - - ( 1 )
[0048] where M(q)∈R n×n is the inertia matrix of the joint space, is the coupling effect of centrifugal force and Coriolis force, τ∈R n is the joint driving torque, the degree of freedom n>6, and the redundant ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com