Six-dimensional sensor calibration device
A six-dimensional force sensor and calibration device technology, applied in the direction of measuring devices, instruments, force/torque/work measurement instrument calibration/testing, etc. , to achieve the effect of convenient operation, accurate positioning and simple loading process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
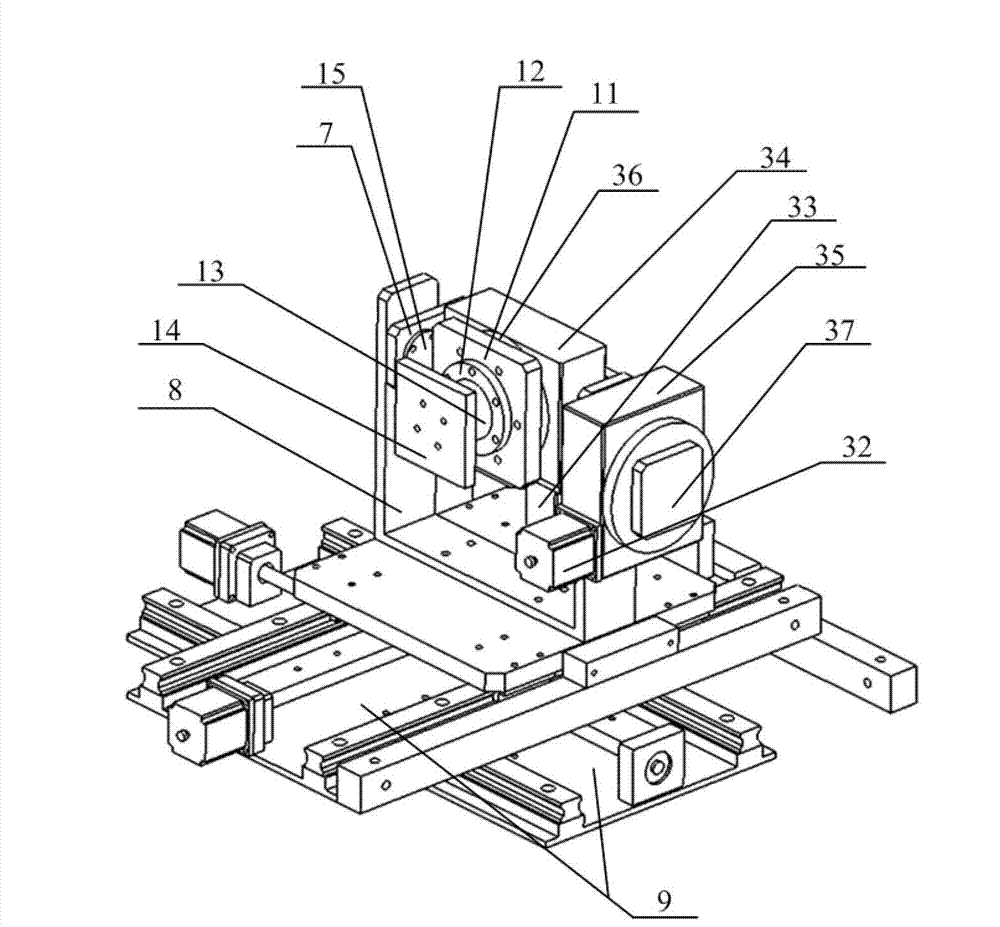
[0026] The present invention will be further described below in conjunction with the accompanying drawings. Such as Figure 1-9 As shown, a six-dimensional force sensor calibration device includes a frame, a loading mechanism, a positioning mechanism and an electrical control system, and the frame is composed of a base 1 and a portal rigid frame 2;
[0027] The loading mechanism includes a servo motor A26, a reducer 25, a gear A42, a gear B43, a gear C44, a gear D45, a gear E46, two ball screws 3, two ball screw nuts 27, a movable beam 4, a standard single The power sensor 5 and the loading head 6, the output shaft of the servo motor A26 is rigidly connected with the input shaft of the reducer 25, the output shaft of the reducer 25 is rigidly connected with the center of the gear A42, one side of the gear A42 meshes with the gear B43, and the gear The other side of A42 meshes with gear C44, gear B43 meshes with gear E46 at the same time, and gear C44 meshes with gear D45 at t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com