Method for solving intrinsic parameters of camera by using three non-concentric circles
A camera internal parameter, arbitrary pairing technology, applied in the field of computer research, can solve the problems of cumbersome operation, high equipment requirements, inconvenience and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
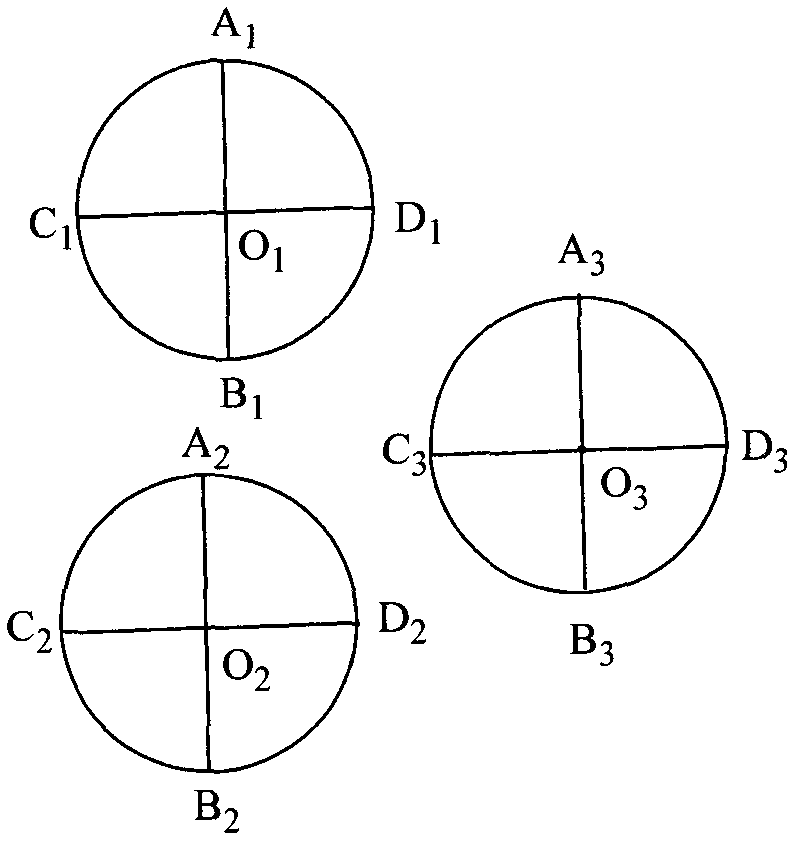
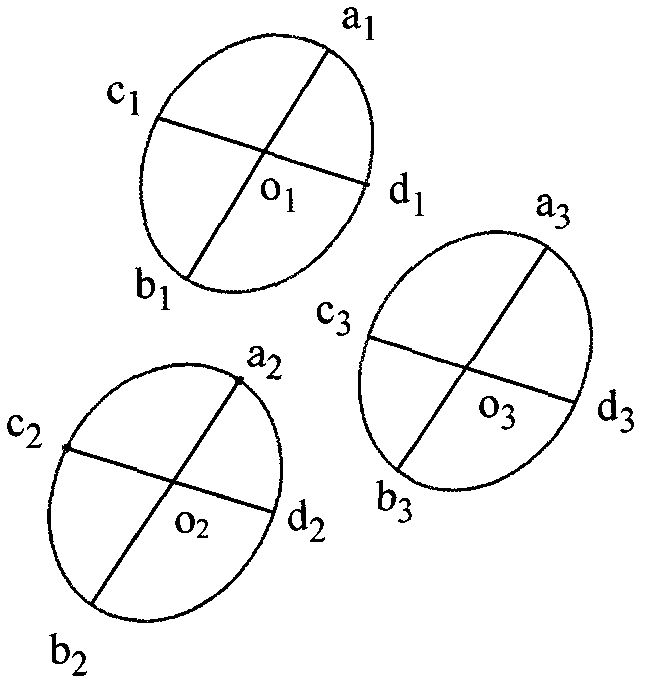
[0039] The invention proposes to determine the target of the internal parameters of the camera by using any three pairs of non-concentric circles on the plane. The experimental module structure diagram that the present invention adopts is as image 3 shown. Embodiment of the present invention is described in more detail with an example below:
[0040] The experimental module used in the camera calibration method based on any three pairs of non-concentric circles is any three pairs of non-concentric circles on the plane, such as image 3 shown. o 1 , O 2 , O 3 are the centers of the three circles. Utilize the method among the present invention to carry out calibration for the video camera of experiment, concrete steps are as follows:
[0041] (1) Fitting the projection curve equations of the three circles in the image
[0042] The image resolution that the present invention adopts is 640 * 480, takes a plurality of experimental pictures from different directions with th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com