Wide-angle binocular vision identifying and positioning device for service robot
A binocular visual recognition and service robot technology, applied in two-dimensional position/channel control, etc., can solve the problems of poor dynamic real-time performance, small viewing angle range of service robots, and low tracking continuity, so as to achieve timely tracking feedback and improve control Performance, the effect of improving service capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Below in conjunction with accompanying drawing, technical scheme, working principle of the present invention are further explained:
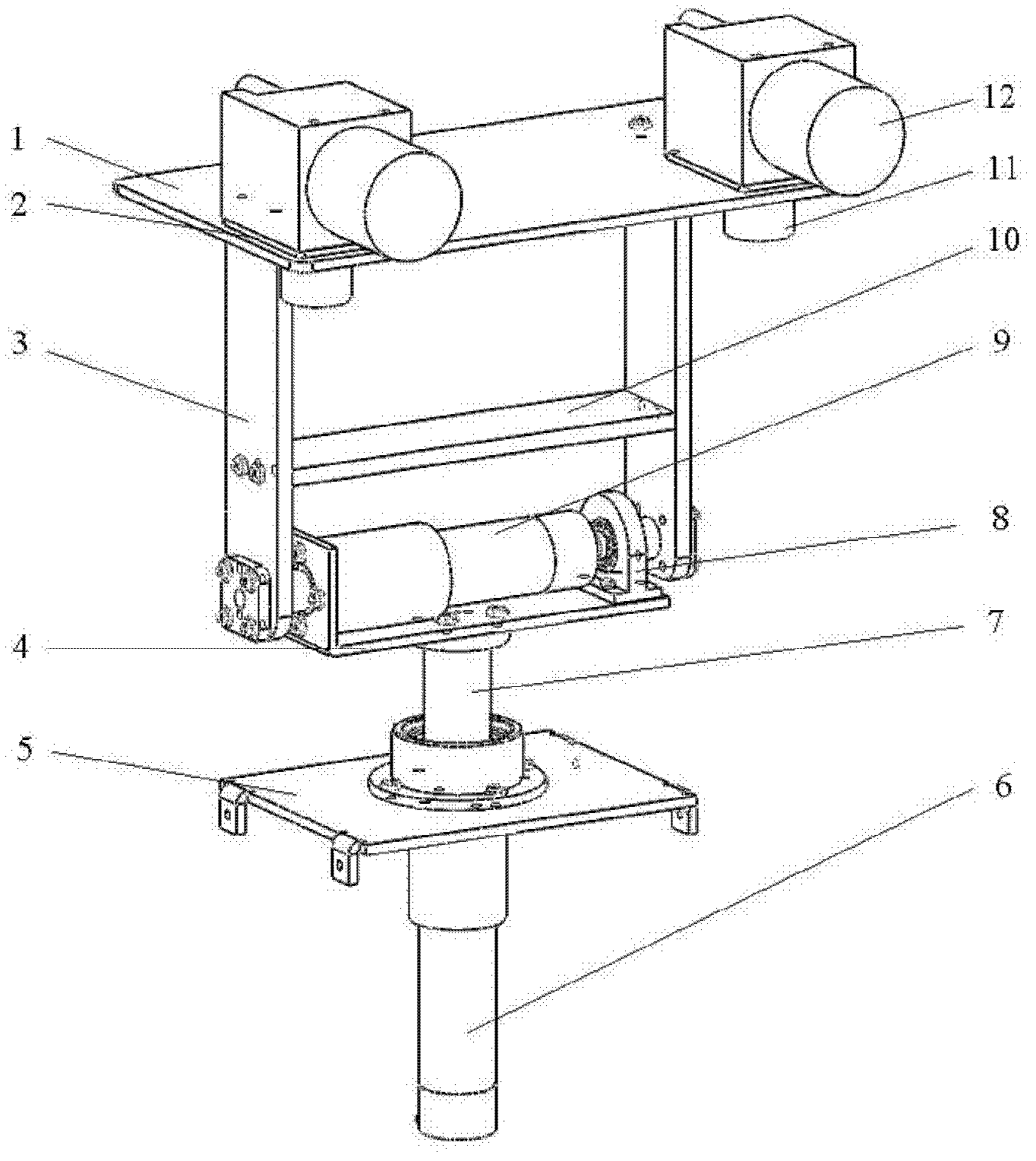
[0020] See figure 1 , the mechanical structure of the present invention has a frame assembly and a servo assembly, and the frame assembly includes a camera mounting plate 1, two side support plates 3 for supporting the camera mounting plate, a head base 4 positioned below the two side support plates and a head base located at the head The head horizontal servo motor mounting plate 5 below the base, the horizontal support plate 10 for reinforcement is arranged between the above two side support plates 3, the above head base 4 and the head horizontal servo motor mounting plate 5 pass through the coupling 7 Rotationally connected, the camera 12 as the observation eye of the robot is rotatably installed on the camera mounting plate 1 through the camera base 2 .
[0021] The above-mentioned servo assembly includes two eye rotation servo motor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com