High-precision integrated navigation positioning method for underwater glider
An underwater glider and integrated navigation technology, applied in the field of navigation, can solve the problem of not being able to wait
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
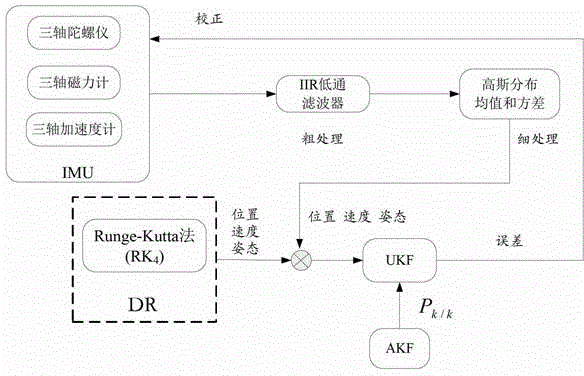
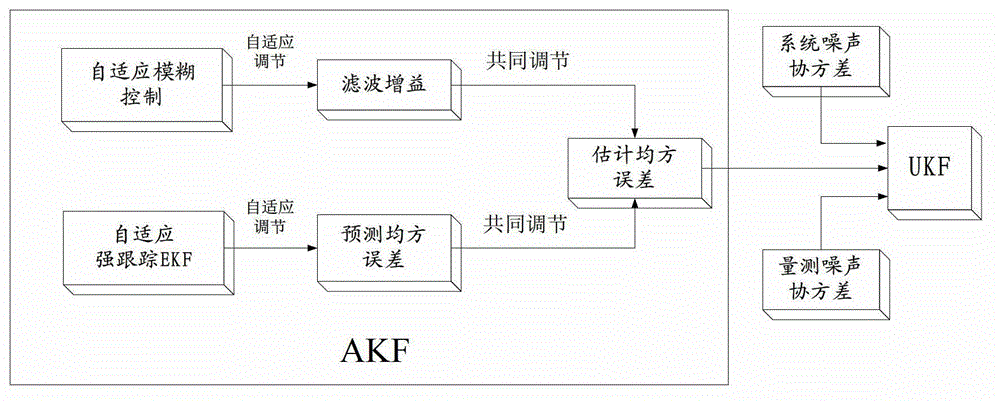
[0040] The invention discloses a high-precision integrated navigation and positioning method for underwater glider, which involves the output of the inertial measurement unit IMU to obtain higher-precision data after rough processing and fine processing; based on Runge-Kutta (RK 4 ) method of dead reckoning DR; hierarchical filtering algorithm adaptive Kalman AKF and unscented Kalman UKF; the IMU output data after twice processing is fused with the DR output as the input of UKF, and fed back to the IMU after filtering to correct the IMU cumulative error.
[0041] The present invention comprises the following steps:
[0042] (1) The original data output by the IMU has relatively large noise, and the high-frequency noise can be removed by the IIR low-pass filter. But the cut-off frequency should not be too low, otherwise useful signals will be filtered out and the actual filtering results will be deviated. The IIR low pass filter is designed as:
[0043] s ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com