Legged robot state sensing system based on dual core processing technology
A technology of nuclear processing and robotics, which is applied in the directions of instruments, measuring devices, surveying and mapping, and navigation, etc., which can solve the problems of not being able to meet the work requirements and lack of state perception technology for complex legged robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
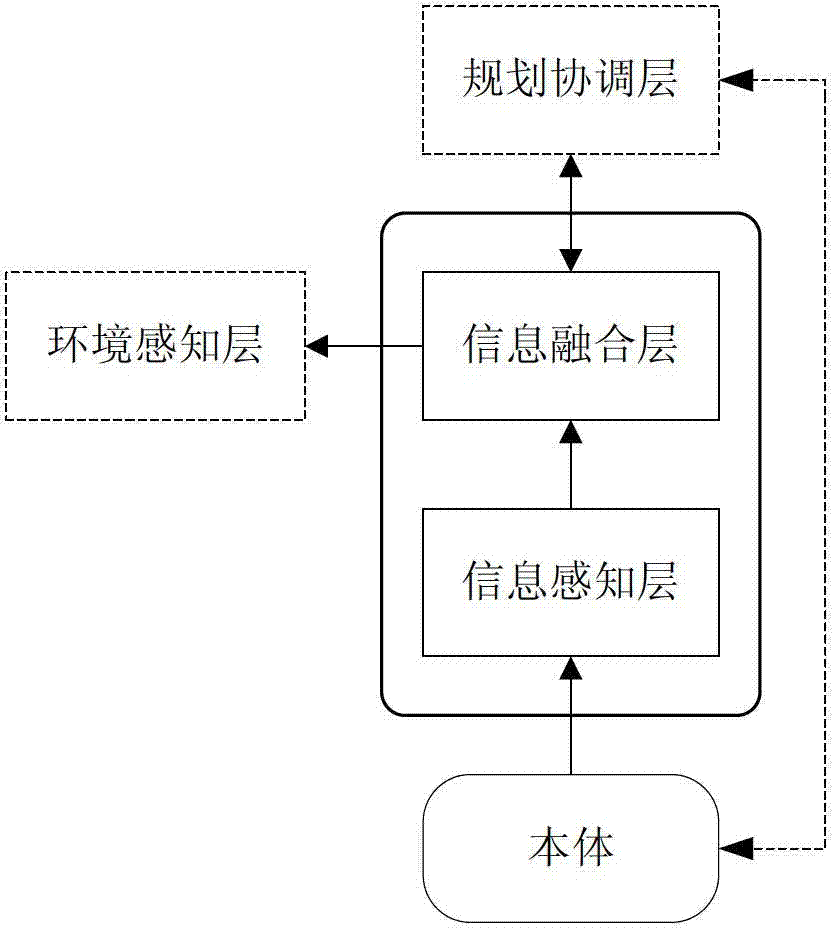
[0024] like figure 1 and figure 2 As shown, a legged robot state perception system based on dual-core processing technology,
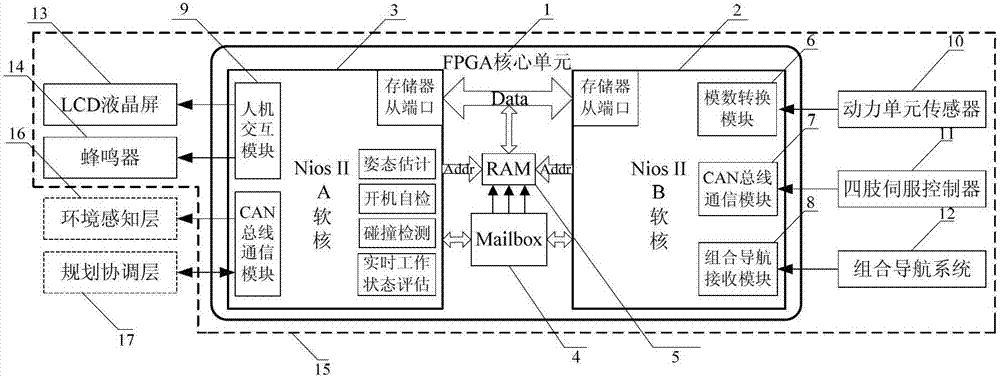
[0025] The data acquisition layer and data processing layer are constructed using a "data-centered" layered structure, and a dual-core system architecture is built on this basis, that is, based on the FPGA core unit, SOPC technology is used to embed two RISC embedded processors in the chip Realized by the NIOS II soft core of the device, it has an analog-to-digital conversion module, two CAN bus communication modules, a combined navigation receiving module and a human-computer interaction module; the power unit sensor, the limb servo controller, and the combined navigation system are respectively connected with the FPGA core unit Serial connection, LCD liquid crystal screen, buzzer are respectively connected in parallel with FPGA core unit; among them:
[0026] The data acquisition kernel (NIOS II B soft core for short) used to construct the data ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com