Three-point differencial GPS (Global Position System) dynamic positioning accuracy calibration method
A calibration method and accuracy technology, applied in the direction of measuring devices, instruments, etc., to achieve the effect of convenient establishment of benchmarks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The three-point differential GPS dynamic orientation accuracy calibration method of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
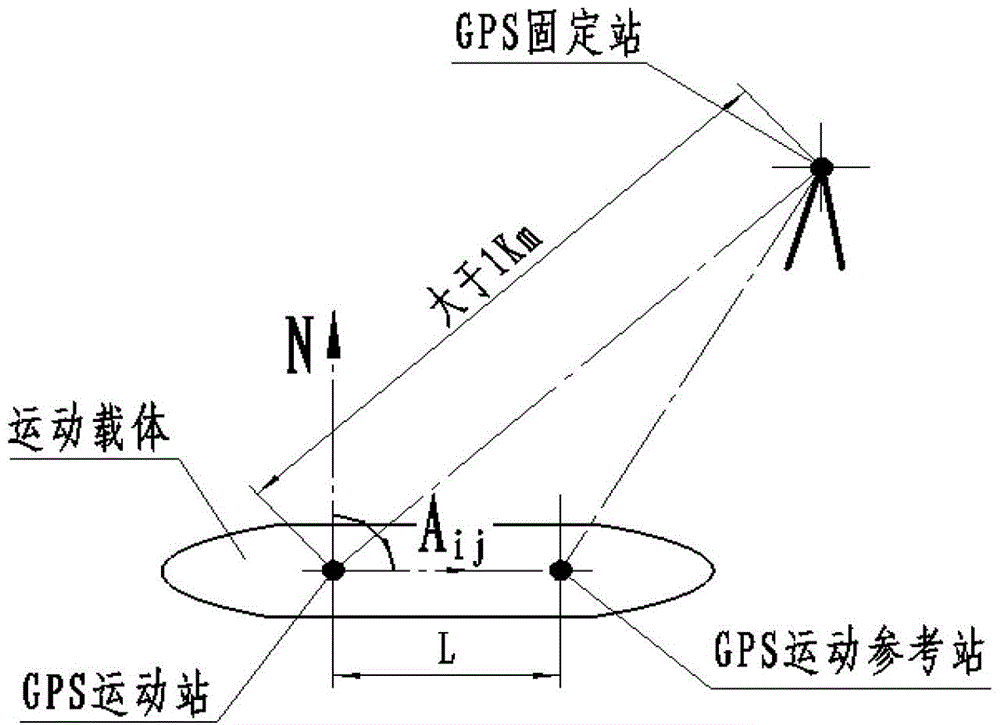
[0024] Such as figure 2 As shown, the three-point differential GPS dynamic orientation accuracy calibration method of the present invention comprises the steps:
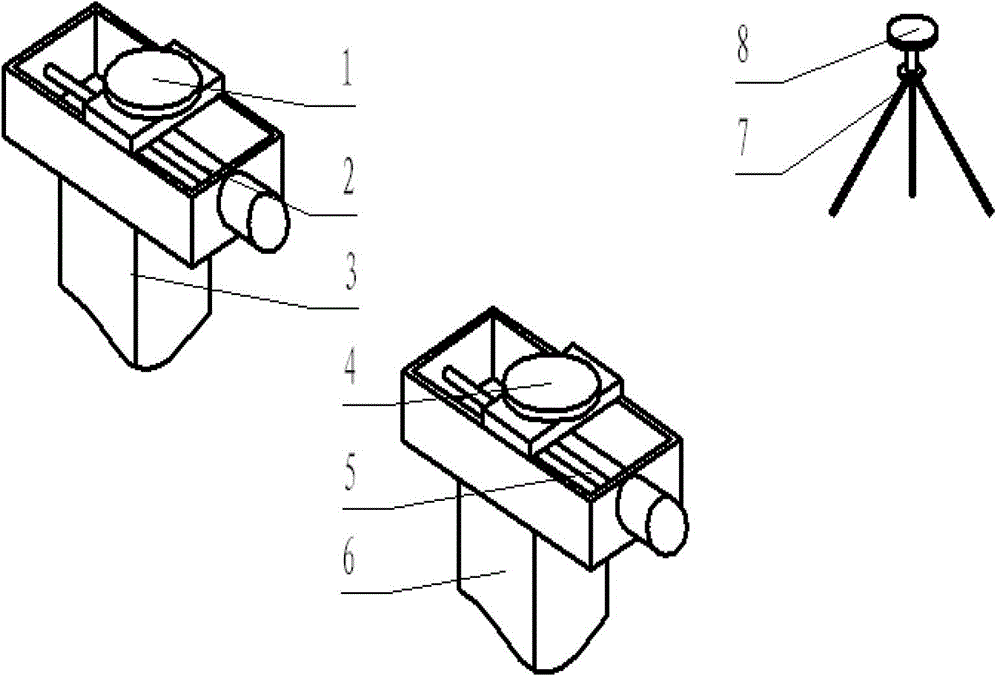
[0025] (a) Set the GPS fixed station 8 first, that is, install the antenna of the GPS fixed station on the tripod 7, connect the antenna of the GPS fixed station to the receiver of the GPS fixed station, and connect the receiver of the GPS fixed station to the transmitting station;
[0026] Then set up two GPS motion stations and GPS motion reference stations with a distance of 10m to 100m (for example, 10m or 100m);
[0027] Place the GPS antenna 1 of the GPS exercise station on the electric guide rail one 2, and the electric guide rail one 2 is erected on the reference point i3 of the GPS exercise ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com