


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Uncalibrated visual servoing using real-time velocity optimization
A technology of visual servoing and digital video, applied in the field of visual servoing, to achieve the effect of eliminating necessity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
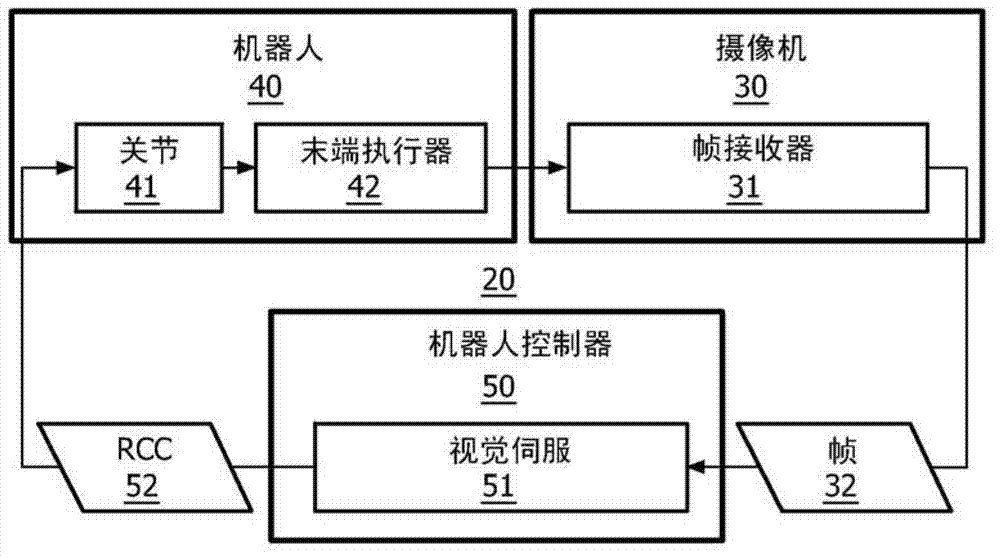
[0024] like figure 1 As shown, the robotic system 20 employs the camera 30 , the robot 40 and the robot controller 50 to implement any robotic process involving the autonomous movement capabilities of the robot 40 . Examples of such robotic processes include, but are not limited to, medical procedures, assembly line processes, and processes involving mobile robots. Specifically, medical procedures to which the robotic system 20 can be applied include, but are not limited to, minimally invasive cardiac surgery (eg, coronary artery bypass grafting or mitral valve replacement), minimally invasive abdominal surgery (laparoscopy) (eg, prostatectomy or cholecystectomy) and endoscopic surgery that traverses the lumen through a natural orifice.
[0025] Camera 30 may be any type of camera with a forward-facing optical viewfinder or a tilting optical viewfinder, and it employs any type of frame grabber 31 capable of recording at a predetermined frame rate (e.g., 30 frames per second) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com