Hydraulic aerial cage operation platform trajectory control device
An aerial work vehicle and trajectory control technology, which is applied in the direction of lifting device, control using feedback, safety device of lifting equipment, etc., can solve the problem of endangering the life safety of operators, the mathematical operation relationship of the rotation angle is not clearly given, and the error cannot be realized. Full compensation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0153] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
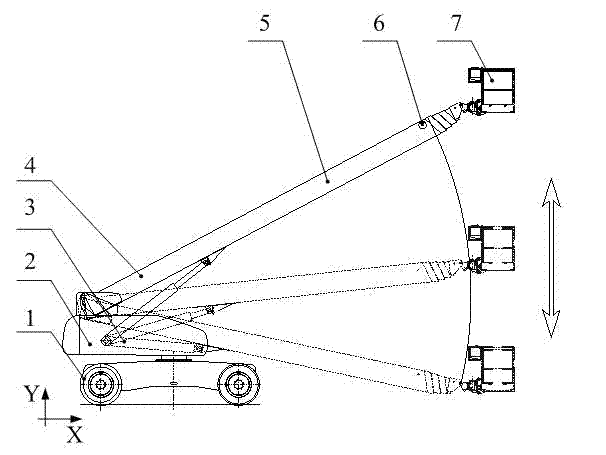
[0154] The track control device of the aerial work vehicle of the present embodiment includes the following parts:
[0155] 1. Operating mechanism
[0156] 1.1 Self-reset trajectory control enable button: the circuit is not connected under normal conditions, and the device is controlled by normal operation at this time. When the button is pressed, the intelligent trajectory control is enabled, and the normal normal operation control is blocked at the same time.
[0157] 1.2 The three-position rocker switch is used as a movement learning button and a movement reproduction button. On the premise that the self-resetting trajectory control enable button is pressed and held, the rocker switch is pressed to the upper position to start the motion learning function, and the controller can memorize the motion parameters (path, speed) of the aerial work vehic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com